انکودر چیست؟
انکودر چیست؟
در بسیاری از سیستم های خودکار، حرکت هایی به صورت دقیق و پیوسته تکرار می شوند. این حرکت ها یک مجموعه عملکرد را تشکیل می دهند. به عنوان مثال رباتی را در نظر بگیرید که در آن یک بازو با مدل خاصی حرکت کرده و دائم آن را تکرار می کند. یکی از اصلی ترین قطعه هایی که در موقعیت یابی و تعیین میزان جابه جایی قطعات مکانیکی استفاده می شود، انکودر نام دارد. انکودر نوع خاصی از سنسور هاست که اطلاعات موقعیت را دریافت کرده و این اطلاعات را به تجهیزات دیگر منتقل می کند. انکودر ها جهت تشخیص موقعیت یا position، سرعت یا velocity و جهت گردش شفت موتور یا direction یا سایر تجهیزات متحرک مکانیکی استفاده می شود. آن ها اطلاعات لازم جهت کنترل دقیق سرعت در برخی کاربرد ها را فرآهم می کنند. برخی از این کاربرد ها عبارت اند از:
- موقعیت یابی یک میز گردان rotary table
- برداشتن و در جایی گذاشتن pick and place
- مونتاژ ماشین آلات
- بسته بندی
- رباتیک و غیره
عملکرد انکودر
به صورت کلی نحوه ی عملکرد انکودر به صورت زیر است:
- به دو صورت خطی و دورانی روی شفت الکتروموتور یا قطعه ی متحرک نصب می شود.
- این سنسور حرکت های جسم مورد نظر را به پالس های دیجیتال یا آنالوگ منظم تبدیل می کند.
- این پالس ها توسط سیستم های کنترلی ابزار دقیق مانند پی ال سی اینورتر یا درایو شمارش و کنترل می شوند.
- در ادامه پس از رسیدن به تعداد یا مقدار مورد نظر، یک دستور صادر می شود.
 |
 |
 |
 |
انکودر ها از نظر تکنورلوژی ساخت به گروه های مختلفی تقسیم می شوند که عبارت از اند:
- مغناطیسی یا Magnetic
- القایی یا Inductive
- یا Capacitive
- لیزر یا Laser
- نوری یا Optical: مدل های نوری دقیق ترین نوع انکودر ها هستند.
نکته ی مهم در استفاده از این کد کننده ها، بالا رفتن خطا با بیشتر شدن دقت است. این پدیده به دلیل همدوس نبودن پرتوی نور است. به منظور رفع این مشکل باید از پرتوی لیزر استفاده کرد. این سنسور ها در دو نوع مغناطیسی و نوری وجود دارند. مزایای این سنسورها عبارتند از:
- این سنسورها ذاتا دیجیتال هستند.
- به عنصر حس کننده ی نور با اتصال مکانیکی وصل نمی شوند.
- در مقابل تداخل های الکتریکی نویزی، مقاوم هستند.
- قیمت مناسبی دارند.
سنسور های کنترل وضعیت انکودر به دو دسته ی اصلی ساختمانی زیر تقسیم می شوند:
- خطی : بسته به نوع و طول انکودر فاصله ی مشخصی را به تعداد پالس های مشخص تبدیل می کند.
- چرخشی: یک دور که معادل 360 درجه است را به پالس های مشخص تبدیل می کند.
هم چنین این سنسور ها از نظر عملکرد در دو گروه زیر قرار می گیرند:
- افزایشی: این نوع صفر مطلق ندارد و با وصل تغذیه، موقعیت کنونی صفر فرض شده و در اثر گردش پالس های خروجی را ارائه می دهد.
- مطلق: در این نوع موقعیت مکانی یا درجه ی شفت در هر لحظه به صورت دیتا برای کنترلر ارسال می شود. یعنی صفر همیشه مشخص است و وضعیت با قطع برق از بین نمی رود.
انکودرها از نظر نوع تغییرات خروجی نیز به دو مدل افزایشی و مطلق تقسیم می شوند.
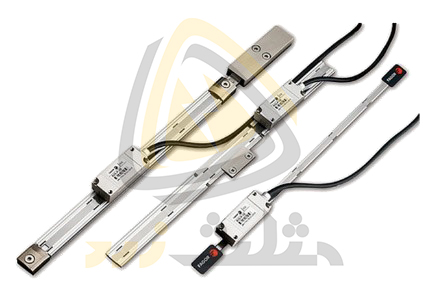
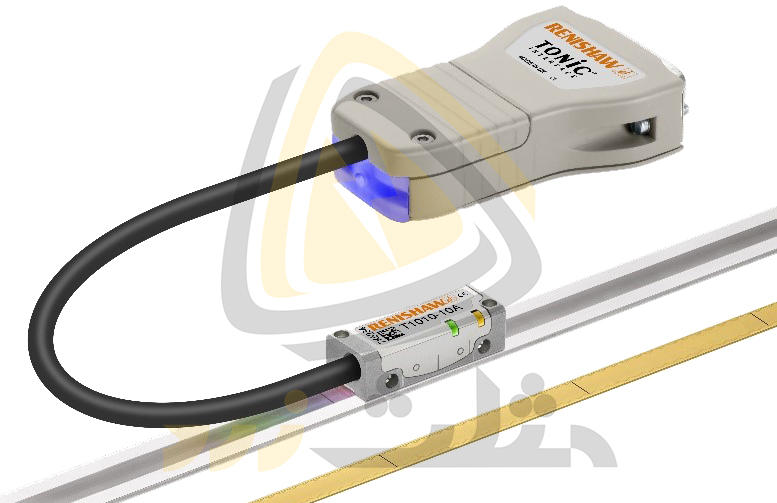
انکودر های خطی یا Linear Encoder
مدل های خطی یا خط کش ها، در واقع سنسور یا ترنسدیوسر نشان دهنده موقعیت هستند. ابتدا سنسور، مقیاس را خوانده و موقعیت خوانده شده را به یک سیگنال آنالوگ و یا دیجیتال کد می کند. این سیگنال توسط یک کنترل کننده موقعیت قابل رمزگشایی یا دکد شدن می باشد. این خط کش ها در دو نوع Absolute و یا Incremental قابل ارائه هستند. تکنورلوژی ساخت خط کش یا انکودرهای خطی شامل نوری، القایی، مغناطیسی، خازنی و جریان گردابی می باشد.
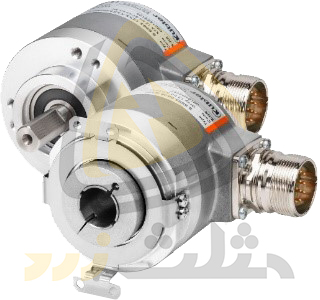
انکودرهای چرخشی، روتاری یا Rotary Encoder
انکودر چرخشی یا شفت انکودر وسیله اي است که موقعیت یا سرعت زاویه ایی و جهت چرخش را به سیگنال دیجیتال یا آنالوگ تبدیل می کند. در مقاله ی بعدی بیشتر به بررسی این تجهیز خواهیم پرداخت.
انکودرهای موقعیت یا Position Encoder
برخی از کاربرد های انکودر های موقعیت عبارت اند از:
- تعیین موقعیت مکانیکی یک جسم یا absolute position
- سنجش موقعیت ابزار و موقعیت یابی multi-axis positioning
- تعیین تغییر در موقعیت میان انکودر و جسم: قابل ذکر است که تغییر موقعیت میان جسم مورد نظر و انکودر یک تغییر تدریجی خواهد بود.
انکدرهای موقعیت در انواع مطلق یا افزایشی تولید می شوند. انیمیشن زیر نمونه ایی از کاربرد این انکدر ها را نشان می دهد.
انکودر های نوری یا Optical Encoder
انکدرهای نوری داده ها را در پالس های نور تفسیر می کنند. در ادامه از این داده ها جهت تعیین مواردی چون موقعیت، جهت و سرعت استفاده می شوند. از انکودر های نوری در کاربرد های مختلفی از جمله چاپگرها، ماشین های CNC milling machines و روباتیک استفاده می شود. این تجهیزات نیز می توانند مطلق یا افزایشی باشند. تصویر زیر نمونه ایی از انکدر های نوری را نشان می دهد.
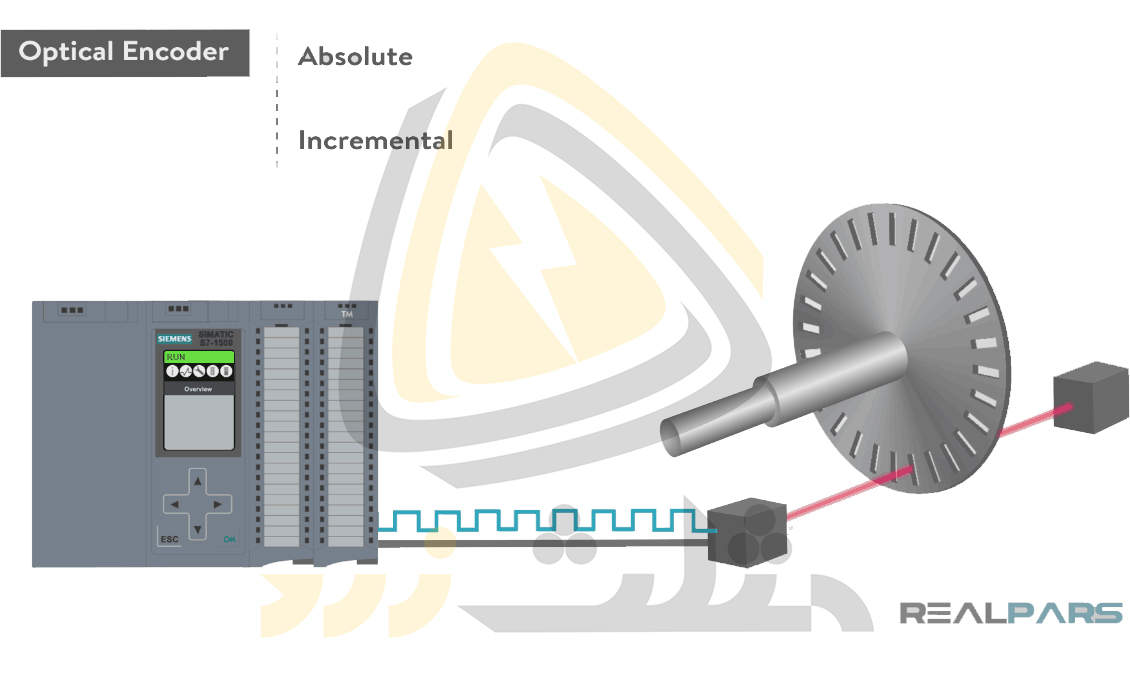
با توجه به نکات ذکر شده در بالا تمامی انکودر ها اساس کار مشابهی دارند. به صورت کلی آن ها یک سیگنال الکتریکی تولید می کنند. در ادامه این سیگنال می تواند به موقعیت، سرعت، زاویه و غیره ترجمه شود.
انکودر افزایشی (Incremental Rotary Encoders)
در این تجهیزات نقطه ی صفر وجود نداشته و با تغییر وضعیت انکودر، خروجی آن تغییر می کند. اطلاعات موقعیت انکودر افزایشی پس از قطع و وصل تغذیه از بین می رود. از این رو سیستم قادر به تشخیص مرحله ی قبلی خود نیست. به منظور رفع این مشکل، دستگاه پس از روشن شدن به حالت اولیه برگشته و مجدد اندازه گیری را شروع می کند.

هر گاه شفت انکودر افزایشی با یک زاویه مشخص گردش کند، یک پالس سیگنال تولید می شود. تعداد سیگنال ها در یک دور کامل، رزولوشن دستگاه را تعیین می کند. پاسخ گویی دینامیک عالی در این تجهیزات موجب ایده آل بودن آن ها در کاربرد های زیر شده است:
- مانیتورینگ سرعت (speed monitoring) در تجهیزات دوار
- مانیتورنگ جهت گردش (direction monitoring) در تجهیزات دوار

انواع خروجی انکودر افزایشی
انکودرهای افزایشی از نظر نوع خروجی در مدل های دیجیتال و آنالوگ ساخته می شوند.
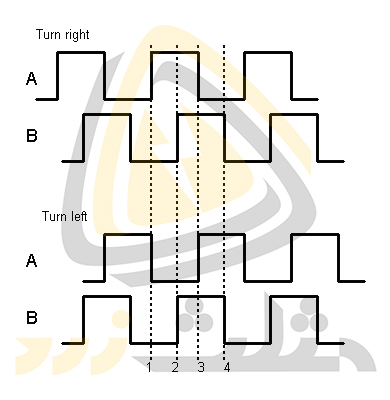
دیجیتال
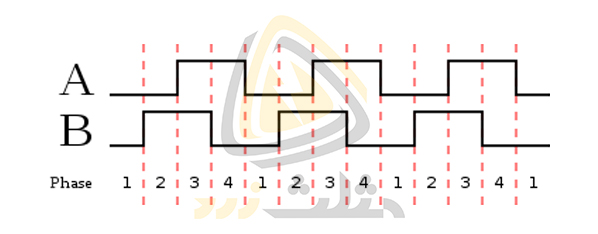
در این سیستم پالس های دیجیتال بر اساس تغییرات موقعیت انکودر ایجاد می شود. این پالس ها 5 ولت DC بوده و به سه گروه A و B و Z تقسیم می شود. پالس A و B با تغییر موقعیت انکودر ایجاد شده و دارای اختلاف فاز 90 درجه ای هستند. کاربرد این نوع پالس شناسایی جهت گردش و جابه جایی است. به عنوان مثال اگر ابتدا پالس A و سپس B ایجاد شود، سیستم در حال حرکت به راست و اگر ابتدا پالس B و سپس پالس A تولید شود، سیستم در حال حرکت به سمت چپ است. پالس Z در انکودرهای دورانی در هر یک دور کامل ایجاد می شود. این پالس در انکودرهای خطی، در فواصل مشخص مانند هر 10 سانتی متر به وجود می آید.
قابل ذکر است که در مکان های پر نویز، علاوه بر پالس های ذکر شده، Not تمام پالس ها نیز به کنترلر ارسال می گردد. به این ترتیب نویز با دقت بالایی از پالس خروجی تفکیک خواهد شد.
آنالوگ
سیگنال های آنالوگ به دو صورت مثلثاتی و خطی وجود دارند. در حالت مثلثاتی خروجی به صورت سینوسی و کسینوسی و در مدل خطی به صورت جریانی یا ولتاژی ایجاد می گردد.
انکودر مطلق (Absolute Rotary Encoders)
در انکودر مطلق نقطه ی صفر وجود دارد. با تغییر موقعیت تجهیز، درجه و یا میزان جابه جایی با توجه به نقطه ی صفر برای کنترلر ارسال می شود. در این مدل اطلاعات موقعیت انکودر پس از قطع و وصل تغذیه از بین نرفته و سیستم ادامه ی کار را پیگیری می کند. خروجی انکودرهای مطلق به صورت باینری بوده و از موقعیت خود یک کد ایجاد می کند.
فرض کنید ما می خواهیم میزان گردش یک الکتروموتور را اندازه گیری کنیم. در این حالت نیازی به داشتن نقطه ی صفر نبوده و با گردش شفت، خروجی دستگاه بررسی می شود. در حالی که در برخی از سیستم ها مانند اندازه گیری طول قطعات با انکودرها، نیاز به مشخص بودن صفر سیستم است. به عنوان مثال در خط کش های دیجیتال یا CNC از انکودرهای مطلق استفاده می شود.
انکودرهای مطلق، اطلاعات دقیق زاویه ی دورانی و شمارش دور را در یک نقطه ی زمانی مشخص به سیستم کنترل ارائه می دهند. در نتیجه از این تجهز جهت تعیین موقعیت در بسیاری از ماشین آلات استفاده می شود. این عمل با اسکن کردن موقعیت یک المان کدگذاری شده انجام می شود. تمامی موقعیت ها در این سیستم دارای یک کد منحصر به فرد هستند. در این روش حتی در صورت قطع برق کل سیستم، پس از وصل مجدد برق، موقعیت دقیق تجهیز دوار قابل بازیابی خواهد بود.

ترکیب کردن دو انکودر افزایشی و مطلق با یکدیگر مزایایی مانند افزایش قدرت انعطاف در طراحی محصول را به مهندسان ارائه خواهد کرد. هم چنین وجود سیگنال افزایشی در کنار سیگنال مطلق منجر به عملکرد نرمال سنسور برای سیستم در هر لحظه از زمان می شود. 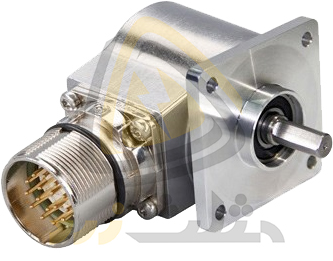
انواع انکودر خطی
این دسته از انکودرها جهت کنترل حرکت های خطی به سمت چپ و راست با دقت نانومتر کاربرد دارند. انکودرهای خطی در دو دسته ی مطلق و افزایشی ساخته می شوند. به صورت کلی سنسورهای موقعیت محور در مدل های زیر ساخته می شوند:
- انکودر نوری
- انکودر مغناطیسی
- انکودر خازنی
- انکودر سلفی
- انکودرهای مکانیکی
- پتانسیومتر
- پتانسیومتر یا انکودر سیمی
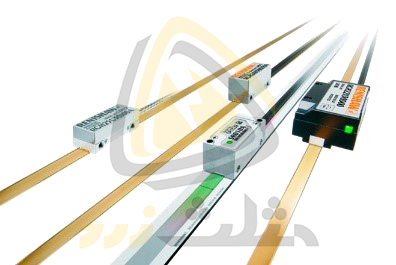
انکودرهای بدون تماس و مقاومت های متغیر به علت سهولت در نصب و بهره برداری، بیشتر مورد استفاده قرار می گیرند. در انکودرهای خطی و بدون تماس، یک نوار رهنما روی سیستم قرار گرفته و انکودر با عبور از روی آن می تواند جابه جایی را با دقت بالا مشخص کند. این نوار را می توان در اندازه های مختلف تهیه کرده و روی سیستم مونتاژ کرد. برخی از انکودرهای خطی نیز در ابعاد استاندارد به صورت مونتاژ شده با ریل عرضه می شوند.
ساختمان انکودر خطی و نوری
در انکودرهای نوری قسمت های اصلی زیر وجود دارد:
- سیستم تابش نور که اغلب یک LED بوده و وظیفه ی آن تولید نور مورد نیاز سنسور است.
- لنز که نور تابیده شده را به شکل خاصی در آورده تا پس از عبور یا برخورد با نوار راهنما برای قسمت گیرنده قابل شناسایی باشد.
- نوار راهنما دارای قسمت های تیره و شفافی است که با حرکت منبع نور، می تواند پالس های نوری ایجاد کند.
- گیرنده، تغییرات نوری که از نوار راهنما عبور می کند را دریافت و با توجه به سرعت و جهت انکودر، کد یا پلس هایی در خروجی ایجاد می کند.
انکودر خطی و نوری علاوه بر مطلق یا افزایشی بودن آن در دو مدل کلی زیر ساخته می شود:
- در مدل اول نوار راهنما از داخل سنسور متحرک عبور می کند. در یک طرف نوار راهنما، منبع نور و در سمت دیگر آن گیرنده قرار دارد.
- مدل دوم به انکودر نوری بدون تماس معروف است. در این نوع، نوار راهنما روی سطح ماشین قرار گرفته و سیستم تابش نور و گیرنده ی آن در سنسور متحرک قرار می گیرد. این سنسور نیاز به ارتباط مکانیکی با نوار راهنمای خود ندارد.
ساختمان انکودر خطی و مغناطیسی
انکودر خطی و مغناطیسی دارای نوار یا میله ی راهنما است. میله ی راهنما شامل قطعات فلزی منظمی است که در یک پوشش قرار دارند. نوار راهنما شامل آهن رباهایی است که به صورت منظم کنار یکدیگر چیده شده اند. به صورت کلی سنسور می تواند تغییرات مغناطیسی نوار یا میله ی راهنما را کنترل کرده و بر اساس میزان جابه جایی، خروجی دقیقی تولید کند. این انکودر نیز با دو خروجی متفاوت مطلق و افزایشی تولید می شود.

جهت مطالعه ده ها مقاله ی تخصصی دیگر، بخش مقالات آموزش مدار فرمان را مشاهده کنید.
 مثلث زرد
مثلث زرد
 مثلث زرد
مثلث زرد مثلث زرد
مثلث زرد
 مثلث زرد
مثلث زرد مثلث زرد
مثلث زرد مثلث زرد
مثلث زرد
Tank you