راهنمای فارسی درایو V1000
تنظیمات درایو V1000
پس از نصب مکانیکی و الکتریکی باید به تنظیمات درایو V1000 بپردازیم. درایو V1000 مجهز به یک کیبورد یا کیپد بوده و از طریق آن می توان به تنظیمات درایو و پارامترها و مانیتورینگ کمیت ها پرداخت. قابل ذکر است که تنظیم و مانیتورینگ کمیت ها از طریق نرم افزار نیز امکان پذیر بوده و در ادامه آن ها بیشتر بررسی می کنیم. اطلاعات مهم در خصوص نصب و سیم بندی درایو را می توانید در مقاله درایو V1000 یاسکاوا و امرن مطالعه کنید. به منظور تنظیم پارامترها باید درایو را روشن کنیم. در صورتی که تمامی اتصالات صحیح باشند، پس از روشن شدن درایو هیچ خطایی روی صفحه نمایش داده نمی شود. قبل از وصل کردن تغذیه درایو نکات زیر را مد نظر داشته باشید.
- مطمئن شوید تمام سیمها به شکل صحیح متصل شده باشند.
- مطمئن شوید هیچ قطعه ی بریده شدهی سیم، ابزار، پیچ و غیره داخل محفظه درایو نباشد.
- پس از وصل برق باید حالت راهاندازی نمایش داده شده و هیچ خطا یا آلارمی وجود نداشته باشد.
گام های نصب و سیم بندی و غیره
در تصویر زیر فلوچارت گام به گام نصب، سیم بندی، وصل تغذیه، تعیین سطح دسترسی و غیره را مشاهده می کنید. در نظر داشته باشید که به منظور مشاهده و ویرایش تمام پارامترها باید سطح دسترسی به صورت صحیح در پارامتر A1-01 انجام شده باشد. در ادامه پارامترهای شرح داده شده در دفترچه راه انداز سریع امرن را مشاهده می کنید. این پارامترها برای هر دو نسخه درایو V1000 ساخت شرکت های امرن و یاسکاوا قابل استفاده هستند. این درایو دارای دفترچه کامل پارامترها بوده که برای اطلاعات بیشتر می توانید به آن مراجعه کنید.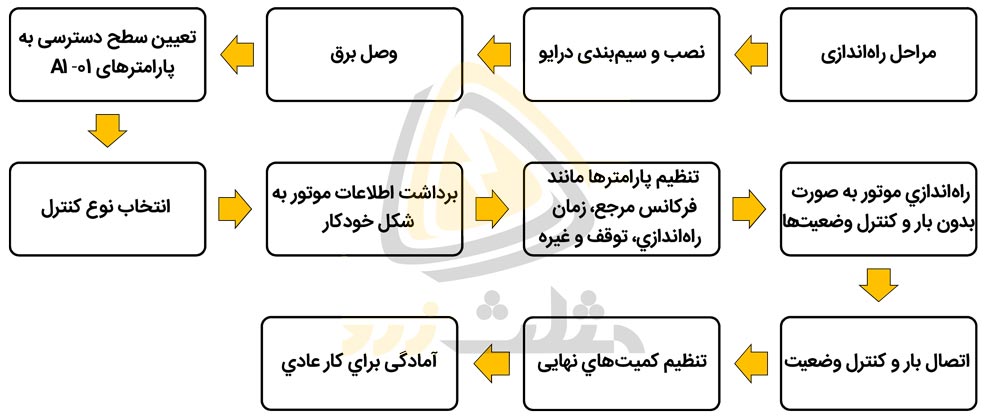
همانطور که قبلا شرح داده شد این درایو دارای دو حالت کنترل محلی یا Local و راهدور یا Remote است. طبق تصویر زیر؛ وضعیت درایو از نظر فرمان پذیری محلی یا ریموت با یک LED نمایش داده می شود. به عبارت دیگر LED روی دکمه LO/RE نمایش دهندهی وضعیت درایو است.
- حالت محلی: LED روشن، فرمان راه اندازی، توقف و تنظیم فرکانس از طریق کلیدها انجام میشود.
- حالت راهدور: LED خاموش، فرمان راهاندازی و فرکانس مرجع از طریق پارامترها تنظیم میشود.

جهت کنترل از راهدور مطمئن شوید پارامترهای b1-01/02 درست تنظیم شده و درایو در حالت ریموت باشد.
پارامتر سطح دسترسی و مد کنترل درایو
در گام اول باید سطح دسترسی به پارامترها و مد کنترلی درایو را تنظیم کنیم. این کار در گروه پارامترهای A1 و طبق جدول زیر انجام خواهد شد. همانطور که مشاهده می کنید هر جدول دارای سه ستون پارامتر، عنوان و شرح است. در بخش پارامتر عبارت نمایش داده شده روی صفحه درایو آورده شده است. این پارامتر طبق اطلاعات ستون شرح قابل تنظیم می باشد. به عنوان مثال پارامتر A1-01 به منظور تعیین سطح دسترسی کاربر استفاده می شود. این پارامتر می توانید یکی از مقادیر 0، 1 یا 2 را داشته باشد.
| پارامتر | عنوان | شرح |
| A1-01 | سطح دسترسی | دسترسی به پارامترهایی که از طریق پنل قابل تنظیم هستند:
0 فقط راهاندازی 1 پارمترهای کاربر 2 سطح دسترسی پیشرفته |
| A1-02 | روش کنترل | انتخاب روش کنترل:
0 برای حالت V/F کنترل 2 برای حالت Open Loop Vector Control 5 برای حالت PM Open Loop Vector Control |
| A1-03 | پارامترهای اولیه | 1110 ریست کردن تما پارامترها (Reset Factory)
2220 کنترل دو سیمه راست گرد با SC1 و چپ گرد با SC2 3330 کنترل سه سیمه به شکل S1 استارت، S2 استپ و S5 راست گرد و چپ گرد |
ذر جدول فوق پارامتر A1-02 مربوط به انتخاب روش کنترلی درایو از حالت های ولتاژ/فرکانس، وکتور کنترل حلقه باز و کنترل حلقه باز در موتورهای مغناطیس دائم است. این روش ها به صورت کلی در مقاله درایو چیست شرح داده شده است. حالت های ممکن در این پارامتر عبارتند از:
- حالت ولتاژ فرکانس یا V/F مقدار پیش فرض این درایو بوده و برای مواردی مانند کاربردهای عمومی، کنترل چندین موتور با یک درایو و هنگام تعویض درایو و مشخص نبودن تنظیمات قبلی آن مناسب است.
- گزینه Open Loop Vector Control (OLV) با عدد 2 و به منظور کاربردهای عمومی، مواردی با دقت و سرعت مورد نیاز بسیار بالا انتخاب می شود.
- گزینه PM Open Loop Vector Control یا عدد 5 و به منظور تغذیهی بارهای با گشتاور مورد نیاز بالا، استفاده از موتورهای مغناطیس دائم (SPM, IPM) و مصرف پائین انرژی استفاده می شود.
روش کنترل راه اندازی
در گروه پارامترهای B المان های مربوط به راه اندازی و توقف مانند نحوه تنظیم فرکانس، دریافت فرمان، جهت گردش، ترمز و غیره تنظیم می شود. به عنوان مثال در پارامتر B1-01 مشخص می کنیم که درایو فرکانس مرجع خود را از چه طریقی دریافت کند. این فرکانس تعیین کننده سرعت چرخش موتور در هر لحظه است.
| پارامتر | عنوان | شرح |
| B1-01 | انتخاب فرکانس کاری یا مرجع | 0 توسط اپراتور و تنظیم پارامترهای □□-d1
1 آنالوگهای ورودی A1 یا A2 2 پورتها، 3 بردهای آپشنال، 4 ورودی پالس |
| B1-02 | روش ارسال فرمان کار | 0 توسط اپراتور و فشردن کلیدهای RUN و STOP
1 ورودیهای دیجیتال، 2 پورت ها و 3 بردهای آپشنال |
| B1-03 | روش توقف | حالتهای توقف: 0 توقف نرم، 1 قطع برق، 2 ترمز DC و 3 کاهش سرعت و قطع برق. فرمان راه اندازی جدید قبل از به اتمام رسیدن تایمر قابل قبول نخواهد بود. |
| B1-04 | تغییر جهت گردش | دستور تغییر جهت گردش 0 فعال و 1 غیر فعال |
| B1-14 | انتخاب توالی فاز | انتخاب توالی فاز خروجی 0 استاندارد و 1 جابجا کردن فازها |
روش تنظیم فرکانس مرجع
طبق جدول فوق درایو می تواند فرکانس مرجع را از روش انتخاب شده در پارامتر B1-01 دریافت کند. این پارامتر می تواند مقادیر 0 تا 4 را داشته باشد. شرح هر یک از مقادیر عبارتند از:
| B1-01 | منبع ورودی | روش تنظیم |
| 0 | کلیدهای روی درایو | فرکانس را در پارامتر □□-d1 تنظیم کرده و از ورودیهای دیجیتال برای سوئیچ بین آنها استفاده کنید. (مولتی اسپیدها) |
| 1 | ورودی آنالوگ | یک سیگنال آنالوگ به ورودیهای A1 یا A2 جهت تنظیم فرکانس اعمال کنید. |
| 2 | پورت سریال | از طریق پورتهای RS422/485 فرکانس را تنظیم کنید. |
| 3 | بردهای آپشنال | از کارتهای آپشنال ارتباطی استفاده کنید. |
| 4 | ورودی پالس | پالسهای تنظیم فرکانس را به ترمینال RP اعمال کنید. |
تزریق جریان مستقیم برای ترمز
یکی از حالت های توقف این درایو در پارامتر B1-03 استفاده از ترمز جریان مستقیم است. پارامترهای مربوط به ترمز DC در گروه B2 و طبق جدول زیر تنظیم می شود.
| پارامتر | عنوان | شرح |
| B2-01 | فرکانس شروع تزریق جریان DC | مقدار فرکانسی که در حالت توقف نرم (B1-03=0) پس از آن جریان DC تزریق می شود.
اگر B2-01<E1-09 باشد، جریان DC در E1-09 تزریق خواهد شد. |
| B2-02 | جریان ترمز DC | تنظیم مقدار جریان DC جهت ترمز بر اساس درصدی از جریان نامی درایو در این پارامتر انجام می شود. در حالت OLV مقدار جریان تزریق شده توسط پارامتر E2-03 تعیین خواهد شد. |
| B2-03 | زمان ترمز DC قبل از راهاندازی | تنظیم زمان تزریق جریان DC قبل از راهاندازی با حداقل واحد یک صدم ثانیه در این بخش انجام می شود. برای غیر فعال کردن این قابلیت باید مقدار زمان روی صفر باشد. |
| B2-04 | زمان تزریق DC پس از استپ | تنظیم زمان تزریق جریان DC پس از توقف با حداقل واحد یک صدم ثانیه در این بخش انجام می شود. برای غیر فعال کردن این قابلیت باید مقدار زمان روی صفر باشد. |
مولتی اسپید ها یا فرکانس های چندگانه
در صو.رتی که پارامتر B1-01 روی 0 تنظیم شده باشد می توان از ورودی های دیجیتال برای انتخاب فرکانس استفاده کرد. این درایو می تواند تا 16 سرعت مختلف را در پارامترهای D1-01 تا D1-16 داشته باشد. این سرعت ها به صورت باینری توسط ورودی های دیجیتال قابل انتخاب هستند.
| پارامتر | عنوان | شرح |
|
D1-01 to D1-16 |
فرکانسهای کاری از 1 تا 16 | تنظیمات سرعتهای مختلف از 1 تا 16 |
| D1-17 | حالت Jog | یک سرعت ثابت با تنظیمات راهاندازی و توقف مجزا تحت عنوان Jog Speed جهت تست و غیره |
تنظیم برداشت خودکار پارامترهای موتور
این درایو قابلیت برداشت اطلاعات موتور به صورت خودکار را دارد. این توانایی اصطلاحا Auto-Tuning نام داشته و با 3 روش کلی در پارامتر T1-01 انجام می شود. در صورت عدم استفاده از برداشت خودکار اطلاعات می توانید پارامترهای موتور از جمله توان نامی، ولتاژ نامی، جریان نامی و …. را در پارامترهای T1-02 تا T1-11 به صورت دستی تنظیم کنید.
| پارامتر | عنوان | شرح |
| T1-01 | روش برداشت اطلاعات | 0: چرخشی، 2: تنها مقاومت بین ترمینالها، 3: چرخشی با مصرف انرژی پائین |
| T1-02 | توان نامی موتور | تنظیم توان نامی موتور بر اساس کیلو وات |
| T1-03 | ولتاژ نامی موتور | تنظیم ولتاژ نامی موتور بر اساس ولت |
| T1-04 | جریان نامی موتور | تنظیم جریان نامی موتور بر اساس آمپر |
| T1-05 | فرکانس پایه موتور | تنظیم فرکانس نامی موتور بر اساس هرتز |
| T1-06 | تعداد قطبهای موتور | تنظیم تعداد قطبهای موتور |
| T1-07 | سرعت پایه موتور | تنظیم سرعت نامی موتور بر اساس دور در دقیقه |
| T1-11 | تلفات آهنی موتور | مقدار تلفات آهنی برای مشخص کردن ضریب کاهش انرژی |
همانطور که مشاهده کردید برداشت خودکار اطلاعات طبق پارامتر T1-01 در 3 حالت امکان پذیر است. اطلاعات بیشتر در خصوص این روش ها را می توانید در جدول زیر مشاهده کنید:
| روش تنظیم | پارامتر | روش کنترل | شرح |
| Rotational
Auto-Tuning |
T1-01=0 | OLV | گزینهی مناسب هنگامی که درایو در مد کاری OLV است. برای دقت بالا در برداشت اطلاعات موتور باید قابلیت چرخش در حالت بی باری را داشته باشد. |
| Terminal Resistance Tuning | T1-01=2 | OLV, V/F Control | گزینهی مناسب هنگامی که درایو در مد کاری V/F بوده و کابلهای خروجی درایو تا موتور طول زیادی داشته و یا تغییر کرده باشند. |
| Rotational
Auto-Tuning For Energy Saving |
T1-01=3 | V/F Control | گزینهی مناسب هنگامی که از مد های کاهش مصرف استفاده شده یا بررسی دقیق سرعت مورد نیاز باشد. برای دقت بالا در برداشت اطلاعات موتور باید قابلیت چرخش در حالت بی باری را داشته باشد. |
پروسه برداشت پارامترهای موتور
در تصویر زیر مراحل تنظیم درایو برای برداشت اطلاعات به صورت چرخشی را مشاهده می کنید.

در خلال برداشت اطلاعات به شکل خودکار، اتصالات قطع اضطراری باید برقرار باشد.
اگر به هر دلیلی مانند عدم توانایی کار در بی باری و … برداشت خودکار اطلاعات امکان پذیر نبود:
- حد نهایی ولتاژ و فرکانس را در پارامتر □□-E1 تنظیم کنید.
- پارامترهای موتور را به شکل دستی در □□-E2 تنظیم کنید.
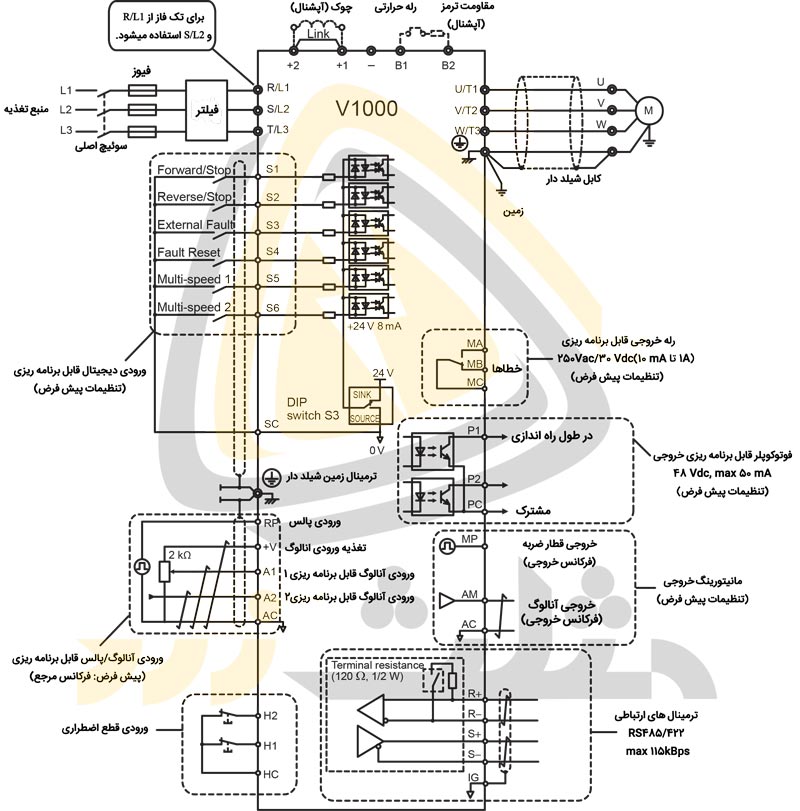
تنظیم ورودی ها و خروجی های کنترلی
این درایو دارای تعدادی ورودی و خروجی به صورت دیجیتال و آنالوگ است. هر یک از ورودی ها و خروجی ها در پارامتر خاصی قابل تنظیم هستند. پیش فرض این ورودی ها و خروجی ها در تصویر زیر نمایش داده شده است.
ورودی و خروجی های دیجیتال
وظیفه ی 6 ورودی دیجیتال و قابل برنامه ریزی این درایو در پارامترهای H1-01 تا H1-06 مشخص می شود. این درایو مجهز به 3 خروجی دیجیتال بوده که فانکشن های آن ها در H2-01 تا H2-03 قابل انتخاب هستند.
| پارامتر | عنوان | شرح |
|
H1-01 To H1-06 |
فانکشنهای ورودیهای دیجیتال S1 تا S6 | فانکشنهای مورد نظر خود را برای ورودیهای دیجیتال S1 تا S6 از فهرست انتخاب کنید. |
| H2-01 | فانکشن خروجی MA/MB | فانکشن خروجی رله با پلاتینهای MA-MB-MC از این بخش انتخاب میشود. |
| H2-02 | فانکشن خروجی P1 | فانکشن خروجی فتوکوپلر شمارهی 1 از این بخش انتخاب میشود. |
| H2-03 | فانکشن خروجی P2 | فانکشن خروجی فتوکوپلر شمارهی 2 از این بخش انتخاب میشود. |
نقش هر ورودی یا خروجی قابل برنامه ریزی در سیستم های کنترلی اصطلاحا فانکشن آن نامیده می شود. ورودی و خروجی های دیجیتال این درایو نیز به صورت قابل برنامه ریزی بوده و فانکشن های آن ها از جدول زیر قابل انتخاب هستند. به عنوان مثال قرار دادن پارامتر H1-04 روی عدد F به معنی عدم استفاده از ورودی دیجیتال شماره 4 است.
| فانکشنهای ورودیهای دیجیتال | عنوان | فانکشنهای خروجیهای دیجیتال | عنوان |
| 3 | سرعتهای چندگانه، مرجع اول | 0 | در حال کار |
| 4 | سرعتهای چندگانه، مرجع دوم | 1 | سرعت صفر |
| 5 | سرعتهای چندگانه، مرجع سوم | 2 | سرعت تنظیم شده |
| 6 | فرکانس Jog با اولویت بالاتر … | 6 | آماده به کار بودن درایو |
| 7 | زمان راهاندازی و توقف 1 | E | خطا |
| F | وقتی از ترمینالی استفاده نمیشود. | F | وقتی از ترمینالی استفاده نمیشود. |
| 14 | ریست خطا | 10 | حداقل خطا یا آلارم |
| 20 to 2F | تنظیمات ورودی خطای خارجی شامل نوع کنتاکتها و وضعیت دریافت فرمان | ||
ورودیهای آنالوگ قابل برنامهریزی
به منظور تعیین فرکانس مرجع و جهت گردش می توان از ورودی های آنالوگ استفاده کرد. این درایو دارای 2 ورودی آنالوگ قابل تنظیم در پارامترهای H3-01 تا H3-12 می باشد. پیشفرض هردو ورودی آنالوگ فرکانس مرجع است. در نظر داشته باشید که ورودی A1 ولتاژی 0 تا 10 ولت و ورودی A2 ولتاژی یا جریانی4 تا 20 میلی آمپر می باشد. برای تغییر حالت A2 بین ولتاژ و جریان مطمئن شوید دیپ سوئیچ S1 و پارامترهای H3-09 به درستی تنظیم شده باشند.
| پارامتر | عنوان | شرح |
| H3-01 | سطح سیگنال A1 | 0: سیگنال 0 تا +10 v مقادیر منفی صفر لحاظ خواهند شد. 1: سیگنال 0 تا +10 v دوقطبی یا دو جهته |
| H3-02 | فانکشن ورودی A1 | فانکشنی که برای ورودی ترمینال A1 در نظر دارید انتخاب کنید. |
| H3-03 | فعال شدن فانکشن A1 | تنظیم مقدار ورودی بر اساس درصد در ورودی 10 ولت آنالوگ |
| H3-04 | غیر فعال شدن فانکشن A1 | تنظیم مقدار ورودی بر اساس درصد در ورودی 0 ولت آنالوگ |
| H3-09 | سطح سیگنال A2 |
0: سیگنال 0 تا +10 v مقادیر منفی صفر لحاظ خواهند شد. 1: سیگنال 0 تا +10 v دوقطبی یا دو جهته 2: سیگنال جریانی 4 تا 20 mA (ورودی 9 بیت) 3: سیگنال جریانی 0 تا 20 mA |
| H3-10 | فانکشن ورودی A2 | فانکشنی که برای ورودی ترمینال A2 در نظر دارید انتخاب کنید. |
| H3-11 | فعال شدن فانکشن A2 | تنظیم مقدار ورودی بر اساس درصد در ورودی 10 ولت و 20mA آنالوگ |
| H3-12 | غیر فعال شدن فانکشن A2 | تنظیم مقدار ورودی بر اساس درصد در ورودی 0 ولت و 0mA و 4mA آنالوگ |
خروجی های آنالوگ
این درایو مجهز به یک خروجی آنالوگ است. از پارامتر H4 برای تنظیم نوع و مقدار این آنالوگ خروجی استفاده کنید. پیشفرض این آنالوگ نمایش دهنده فرکانس خروجی درایو است.
| پارامتر | عنوان | شرح |
| H4-01 | انتخاب سیگنال مانیتور AM | انتخاب فانکشنی که توسط خروجی آنالوگ AM باید مانیتور شود. |
| H4-02 | فعال شدن فانکشن AM | تنظیم ولتاژ خروجی ترمینال AM برابر با 100 درصد مقدار کمیت مانیتور شونده (حداکثر 10 ولت) |
| H4-03 | غیر فعال شدن فانکشن AM | تنظیم ولتاژ خروجی ترمینال AM برابر با 0 درصد مقدار کمیت مانیتور شونده |
راه اندازی و توقف نرم
این درایو می تواند 4 زمان مختلف برای راه اندازی و توقف داشته باشد. این زمان ها در گروه پارامترهای C1 از C1-01 تا C1-08 تنظیم می شوند. در گروه پارامترهای C2 می توان منحنی مربوط به افزایش و کاهش فرکانس را کمی نرم تر کرد. پارامترهای این بخش در C2-01 تا C2-04 قابل تنظیم هستند.
| پارامتر | عنوان | شرح |
| C1-01 | زمان استارت 1 | تنظیم زمان شتاب گیری یا راهاندازی نرم شماره 1 از مقدار 0 تا حداکثر فرکانس خروجی |
| C1-02 | زمان توقف 1 | تنظیم زمان توقف نرم شماره 1 از مقدار 0 تا حداکثر فرکانس خروجی |
| C1-03 To C1-08 | زمان استارت و توقف2 تا 4 | تنظیم زمان راهاندازی و توقف نرم از شمارهی 2 تا 4 مشابه با پارامترهای C1-01 و C1-02 |
| C2-01 | نرم کردن منحنی 1 | نرم کردن منحنی هنگام شروع راهاندازی نرم |
| C2-02 | نرم کردن منحنی 2 | نرم کردن منحنی هنگام پایان راهاندازی نرم |
| C2-03 | نرم کردن منحنی 3 | نرم کردن منحنی هنگام شروع توقف نرم |
| C2-04 | نرم کردن منحنی 4 | نرم کردن منحنی هنگام پایان توقف نرم |
راه اندازی آزمایشی درایو
پس از تنظیم پارامترهای شرح داده شده تا کنون می توانید راه اندازی آزمایشی را انجام دهید. مراحل زیر برای تست اولیه پیشنهاد می شوند:
- موتور را بدون بار راهاندازی کرده و از عملکرد ورودیها، خروجیها، جهت گردش و غیره مطمئن شوید.
- بار را به موتور متصل کنید.
- موتور را تحت بار راهاندازی کنید.
- مطمئن شوید هیچگونه لرزش، تنش مکانیکی یا توقف در کار آن وجود نداشته باشد.
دیگر پارامترهای تنظیمی درایو
در صورت مشاهده هرگونه مشکل در راه اندازی آزمایشی، سریعا پروسه را متوقف کنید. بروز اشکال در تست های اولیه می تواند بعلت تنظیمات غیر صحیح یا عدم تنظیم برخی از پارامترها باشد. به منظور دسترسی به لیست کامل پارامترها حتما به راهنمای کامل درایو مراجعه کنید. در ادامه برخی از پارامترهای مهم دیگر به صورت لیست آورده شده است.
جبران لغزش و گشتاور
| پارامتر | عنوان | شرح |
| C3-01 | جبران سازی مقدار لغزش | در صورتی که سرعت موتور کمتر از فرکانس اعمال شده به آن بود، این کمیت را افزایش دهید.
در صورتی که سرعت موتور بیشتر از فرکانس اعمال شده به آن بود، این کمیت را کاهش دهید. |
| C3-02 | زمان تاخیر در جبران سازی لغزش |
در صورتی که جبران سازی لغزش به کندی انجام می شود، این مقدار را کاهش دهید. در صورتی که سرعت موتور پایدار نیست، این مقدار را افزایش دهید. |
| C4-01 | جبران سازی مقدار گشتاور |
در صورتی که پاسخ گشتاور کند است، این کمیت را افزایش دهید. در صورتی که نوسان در سرعت/ گشتاور رخ دهد، باید این کمیت را کاهش دهیم. |
| C4-02 | زمان تاخیر در جبران سازی گشتاور |
در صورتی که نوسان در سرعت/ گشتاور رخ دهد، باید این کمیت را افزایش دهیم. در صورتی که پاسخ گشتاور کند است، این کمیت را کاهش دهید. |
شرایط کاری و فرکانس کریر
| پارامتر | عنوان | شرح |
| C6-01 | کار سخت یا نرمال | 0 برای شرایط کار سخت با گشتاور ثابت. Heavy Duty (HD)
1 برای شرایط کاری نرمال با گشتاور متغیر Normal Duty (ND) |
| C6-02 | انتخاب رنج فرکانس کریر |
1: 2kHz 2: 5kHz 3: 8kHz 4: 10kHz 5: 12.5kHz 6: 15kHz 7 تا A شناور با توجه به PMW شماره 1 تا 4 F: مقدار مورد نظر کاربر در صورت افزایش طول کابل بیش از 100 متر، بهتر است این مقدار بین 2 تا 5 باشد. افزایش این کمیت باعث نرم شدن شکل موج می گردد ولی در طرف مقابل، تلفات خازنی نیز افزایش پیدا می کند. |
الگو یا نسبت ولتاژ و فرکانس
| پارامتر | عنوان | شرح |
| E1-01 | ولتاژ ورودی | تنظیم مقدار ولتاژ ورودی |
| E1-04 | حداکثر فرکانس خروجی | برای داشتن نسبت خطی V/F، مقادیـر یکسانی در پارامترهـای
E1-07 و E1-09 تنظیـم کنیـد. در ایـن حالـت پارامتـر E1-08 نادیده گرفته میشود. مطمئن شوید فرکانسها بر اساس قانون OPE10 تنظیم شوند. در صورت رعایـت نکردن رابطـهی زیر، خـطا در درایو ایجــاد خواهد شد: E1-04 ≥ E1-06 ≥ E1-07 ≥ E1-09 |
| E1-05 | حداکثر ولتاژ خروجی | |
| E1-06 | فرکانس پایه | |
| E1-07 | فرکانس خروجی میانی | |
| E1-08 | ولتاژ خروجی میانی | |
| E1-09 | حداقل فرکانس خروجی | |
| E1-10 | حداقل ولتاژ خروجی | |
| E1-13 | ولتاژ پایه |
اطلاعات موتور
| پارامتر | عنوان | شرح |
| E2-01 | جریان نامی یا بار کامل | جریان کامل یا بیمتالی که به صورت خودکار در حالت Auto-Tuning برداشت خواهد شد. |
| E2-02 | لغزش نامی | مقدار لغزش نامی موتور بر اساس فرکانس که به صورت خودکار در Auto-Tuning چرخشی برداشت خواهد شد. |
| E2-03 | جریان بیباری | جریان مغناطیس کنندگی بر اساس آمپر که به صورت خودکار در Auto-Tuning چرخشی برداشت خواهد شد. |
| E2-04 | تعداد قطبها | تعداد قطبهای الکتروموتورکه به صورت خودکار در حالت Auto-Tuning برداشت خواهد شد. |
| E2-05 | مقاومت خط به خط | مقدار مقاومت بین دو فاز الکتروموتور بر اساس اهم که به صورت خودکار در حالت Auto-Tuning برداشت خواهد شد. |
| E2-06 | اندوکتانس نشتی | مقدار افت ولتاژ با توجه به مقدار نشتی اندوکتانس بر اساس درصدی از ولتاژ نامی موتور که به صورت خودکار در حالت Auto-Tuning برداشت خواهد شد. |
ورودی و خروجی پالس
| پارامتر | عنوان | شرح |
| H6-02 | مقیاس ورودی | مقدار پالسهای ورودی بر اساس هرتز که برابر 100 درصد مقدار ورودی است را تنظیم کنید. |
| H6-03 | فعال شدن ورودی پالس | تنظیم مقدار بر اساس درصدی از پالس ورودی تنظیم شده در پارامتر H6-02 |
| H6-04 | غیر فعال شدن ورودی پالس | تنظیم مقدار ورودی بر اساس درصد در 0 هرتز پالس ورودی |
| H6-06 | پارامتر مانیتور شونده | وارد کردن مشخصهی مورد نظر جهت مانیتور به شکل □□-U□ بهعنوانمثال 102 برای U1-02 |
| H6-07 | مقیاس خروجی | تنظیم مقدار پالسهای خروجی وقتی کمیت مورد مانیتور در 100 درصد قرار بگیرد. |
حفاظت در برابر افزایش دما
| پارامتر | عنوان | شرح |
| L1-01 | نوع حفاظت اضافه بار | انتخاب نوع حفاظت اضافه بار الکتروموتور
0: غیر فعال 1: موتور استاندارد با فن 2: موتور استاندارد با تهویهی خارجی 3: موتور وکتور با بازهی سرعت 1:100 |
| L1-02 | زمان تاخیر | تنظیم زمان اضافه بار بر اساس دقیقه (معمولا نیازی به تغییر این پارامتر نیست.) |
جلوگیری از توقف
| پارامتر | عنوان | شرح |
| L3-01 | انتخاب روش مقابله هنگام راهاندازی Accel | 0: غیر فعال: راهاندازی با شیب تنظیم شده انجام شود. موتور ممکن است در بارهای سنگین یا زمان کوتاه متوقف شود.
1: کاربری عمومی: متوقف کردن شتاب گیری هنگامی که جریان بیشتر از مقدار تنظیم شده در L3-02 باشد. 2: هوشمند: راهاندازی در کمترین زمان ممکن |
| L3-02 | سطح جلوگیری از توقف هنگام شتاب گیری Accel | تنظیم مقدار جریان جهت جلوگیری از توقف در حالت راهاندازی و شتاب گیری |
| L3-04 | انتخاب روش مقابله هنگام توقف Decel | 0: غیر فعال: متوقف شدن با شیب تنظیم شده انجام شود. خطای OV ممکن است رخ بدهد.
1: کاربری عمومی: هنگامی که ولتاژ باس DC افزایش پیدا کند، متوقف کردن غیر فعال میشود. |
| L3-05 | انتخاب روش مقابله هنگام کار Run |
0: غیر فعال: توقف موتور یا اضافه بار شدن آن ممکن است رخ بدهد. 1: زمان توقف 1: سرعت با توجه به پارامتر C1-02 کاهش پیدا خواهد کرد. |
| L3-06 | سطح جلوگیری از توقف هنگام کار Run | تنظیم مقدار جریان جهت جلوگیری از توقف در حالت استارت و کار |
مانیتورینگ
مانیتورینگ کمیت هایی چون فرکانس مرجع، فرکانس خروجی درایو، جریان خروجی، سرعت موتور، ولتاژ خروجی مرجع، ولتاژ باس DC، ترمینال های دیجیتال خروجی و غیره به کاربر اجازه میدهد تا شرایط درایو، خطاها و اطلاعات دیگر را مشاهده کند.
|
پارامتر |
عنوان | پارامتر | عنوان |
| U1-01 | فرکانس مرجع Hz | U1-08 |
توان خروجی Kw |
|
U1-02 |
فرکانس خروجی درایو Hz | U1-09 | گشتاور. درصدی از گشتاور نامی |
| U1-03 | جریان خروجی A | U1-10 |
ترمینالهای دیجیتال ورودی
|
|
U1-05 |
سرعت موتور Hz | ||
|
U1-06 |
ولتاژ خروجی مرجع Vac |
||
| U1-07 |
ولتاژ باس Dc |
||
|
U1-11 |
ترمینالهای دیجیتال خروجی | U1-12 | وضعیت درایو |
| U1-13 |
میزان ورودی ترمینال A1 |
||
|
U1-16 |
خروجی سافت در راهاندازی و توقف | U1-14 | میزان ورودی ترمینال A2 |
| U1-24 | فرکانس ورودی پالس | U1-18 |
پارامترهای خطای OPE |
مانیتورینگ خطا
|
پارامتر |
عنوان | پارامتر | عنوان |
| U2-01 | خطای جریان | U2-09 |
خروجی توان در خطای قبل |
|
U2-02 |
خطای قبلی | U2-10 | گشتاور مرجع در خطای قبل |
|
U2-03 |
فرکانس مرجع در خطای قبل | U2-11 |
وضعیت ترمینالهای ورودی در … |
| U2-04 | فرکانس خروجی در خطای قبل | U2-12 |
وضعیت ترمینالهای خروجی در … |
|
U2-05 |
جریان خروجی در خطای قبل | U2-13 | وضعیت درایو در خطای قبل |
| U2-06 | سرعت موتور در خطای قبل | U2-14 |
مجموع زمان کار در خطای قبل |
|
U2-07 |
خروجی ولتاژ در خطای قبل | U2-15 | سرعت راهاندازی نرم در خطای … |
| U2-08 | ولتاژ باس DC در خطای قبل | U2-16 |
جریان محور گشتاور در خطای … |





سلام
واقعا تشکر می کنم که همچنین آموزشهایی را فراهم و کرده اید.
سلام. وقت بخیر. ممنون از نظر لطف شما. خوشحالیم که براتون مفید بوده.
با سلام ،چرا اصلأ از گروه پارامتری fخبری نیست؟!!
سلام. این پارامترها طبق دفترچه راه اندازی سریع درایو هست. برای اطلاعات کامل باید به کاتالوگ اصلی شرکت سازنده رجوع کنید.