راهنمای کار با رلهی سنکرون چک SYNCRO MAX PID
راهنمای کار با رلهی سنکرون چک SYNCRO MAX PID سیرکاتور
1. شرایط سنکرون سازی
در پروسهی سنکرون سازی نیاز به کنترل ولتاژ، فرکانس و اختلاف زاویه بین دو سیگنال یا منبع مختلف است. تنها زمانی که تمام پارامترها به محدودهی مجاز برسند میتوان اتصال را برقرار کرد. برای کنترل پارامترهای فوق، رلهی جدید SYNCRO MAX PID به این شکل عمل میکند:
- اندازهگیری و محاسبه اختلاف ولتاژ بر اساس درصد
- اندازهگیری و محاسبه اختلاف فرکانس بر اساس درصد
- اندازهگیری اختلاف زاویه
جهت تعیین دقیق انطباق زاویه، رلهی SYNCRO MAX PID میزان تغییر یا پیشروی زاویه بر اساس زمان بسته شدن بریکر را محاسبه میکند. علاوه بر این، رلهی SYNCRO MAX PID نرخ تغییر فرکانس یا Rate Of Change Of Frequency ROCOF را بررسی میکند. در صورت بزرگ بودن مقدار ROCOF، پالس همگام سازی صادر نخواهد شد.
2. امکان برقدار کردن باس بیبرق
سنکرون سازی بین دو باس برقدار با پارامترهای مجاز صورت میگیرد. در صورت بیبرق شدن یکی از باسها، عملا امکان محاسبهی اختلاف ولتاژ، اختلاف فرکانس و زاویه میسر نخواهد بود.
برای برقدار کردن باس بیبرق توسط ژنراتور، قابلیت Dead Bus Facility طراحی شده است. در صورت فعال سازی این قابلیت، هنگامی که ولتاژ باس کمتر از ولتاژ باس بی برق بوده و فرکانس ژنراتور صحیح باشد، یک سیگنال سنکرون سازی صادر خواهد شد. ولتاژ باس بیبرق یا Dead bus voltage قابل تنظیم است. برای بازگشت به حالت عادی کافی است کنتاکت کنترل خارجی باز یا بسته شود. این کنتاکت با ترمینالهای 5 و 6 روی رله مشخص شده است.
حتما نکته 1 را مشاهده کنید. ![]()
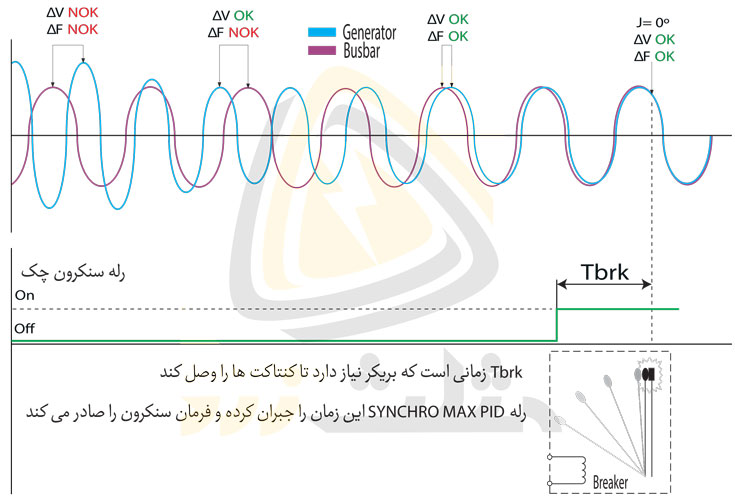
تصویر 1: شرایط همگام سازی و جبران زمان بسته شدن کنتاکت های بریکر
نکته 1 ![]()
هنگام استفاده از قابلیت باس مرده یا Dead Bus Facility نیاز به دستگاه اندازهگیری ویژه و مطمئن است. دستگاه اندازهگیری باید به صورت صحیح تشخیص دهد که باسبار بدون برق بوده و میتوان ژنراتور را متصل کرد. در صورت عدم تشخیص صحیح باس بیبرق و وصل ژنراتور، نتیجه فاجعه بار خواهد بود.
3. مشخصات فنی
3.1. منبع تغذیه AC
مقادیر نامی: 110, 230, 400, 440, 480 V
تلرانس:15%+/10-
فرکانس: 450..30 Hz
میزان مصرف: 10..3 VA
3.2. منبع تغذیه DC
مقادیر نامی: 18..9 , 36..18, 72..36, 170..40 V
میزان مصرف: 1.5..1 W
3.3. مدار اندازه گیری
حاشیه ی ولتاژ اندازه گیری: 150…30, 600…110 VAC
فرکانس: 80..35 Hz
اضافه بار دائم: 800V
میزان مصرف: <500uA
3.4. دقت
ولتاژ RMS: 1±2 digits
فرکانس: 0.01± Hz
زاویه فاز: ° 0.506±
3.5. نمایشگر
تعداد رقم: 4 digits
رنگ: Red با راندمان بالا
تغییرات: 2xseg/sec
LED های جانبی: 30
3.6. شرایط محیطی
دمای انبار داری: -40…70°C
دمای کار: -10…65°C
3.7. رله ها
نوع: کنتاکت چنج آور
مشخصات الکتریکی: 8A 250VAC/ 5A 30VDC
حداکثر ولتاژ سوئیچ: 250VAC/30VDC
حداکثر جریان سوئیچ: 8AAC/5ADC
حداکثر توان سوئیچ: 2000VA/150W
طول عمر مکانیکی: حداقل 10.000.000
طول عمر الکتریکی: حداقل 100.000
مقاومت ایزوله سازی: 1000MW 500VDC
مقاومت دی الکتریک بوبین-کنتاکتها: 4000VAC
مقاومت دی الکتریک کنتاکتهای باز: 1000VAC
مقاومت دربرابر شوک حین عملکرد: 100m/s²
مقاومت در برابر شوک مخرب: 1000m/s²
10-55Hz, 1.5mm dob ampمقاومت در برابر لرزش NO
10-55Hz, 0.8mm dob ampمقاومت در برابر لرزش NC
ساختار: Sealed
نکته 2 ![]()
بارهای سلفی طول عمر رله را به شدت کم میکنند. در صورتی که رله باید موتور DC را کنترل کند، توصیه میشود از رلههای جانبی با میرا کنندهی بوبین استفاده کنید.
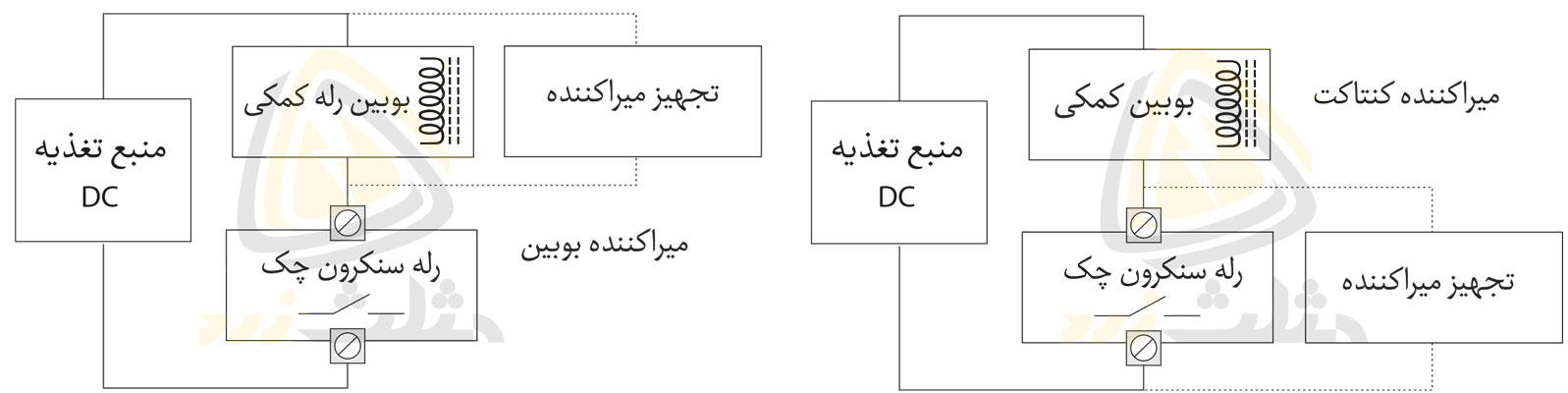
تصویر 2: نحوه ی استفاده از رلهی مجزا و میرا کنندهی بوبین
4. ابعاد
ابعاد: 96x96x81.5
وزن: 510g
جنس بدنه: ABS خود خاموش کننده
رنگ بدنه: خاکستری
حفاظت: IP54 و IP65 به صورت آپشنال
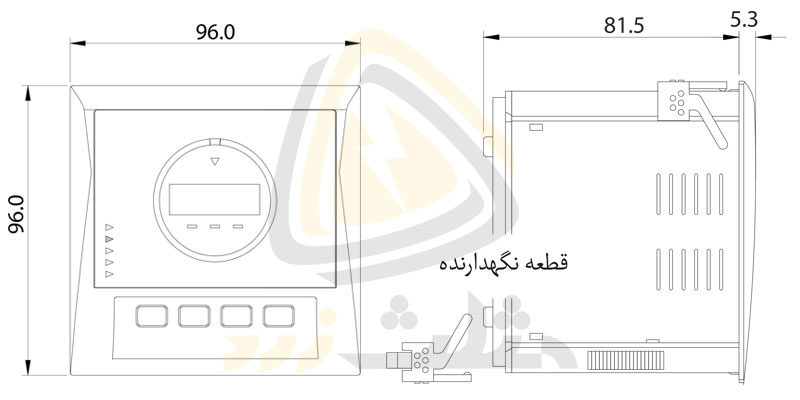
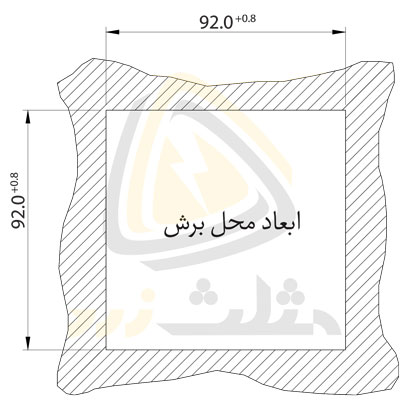
تصویر 3: ابعاد و محل برش نصب
5. حالتهای کاری
5.1.  دستی:
دستی:
در این حالت رلهی SYNCRO MAX PID سرعت موتور یا دیزل را کنترل کرده و تمام پارامترهای اندازهگیری شده و شرایط را نمایش میدهد ولی هرگز رلهی سنکرون را نخواهد بست. اتصال در این حالت باید به صورت دستی صورت بگیرد.
5.2.  کمکی:
کمکی:
در این حالت رلهی SYNCRO MAX PID سرعت موتور یا دیزل را کنترل کرده و تمام پارامترهای اندازهگیری شده و شرایط را نمایش میدهد و در صورتی که کاربر دکمهی ![]() را فشرده نگه داشته باشد، رله در زمان مناسب بسته خواهد شد. به عبارت دیگر برای بسته شدن رلهی خروجی باید دو شرط زیر برقرار باشد:
را فشرده نگه داشته باشد، رله در زمان مناسب بسته خواهد شد. به عبارت دیگر برای بسته شدن رلهی خروجی باید دو شرط زیر برقرار باشد:
- شرایط کامل سنکرون سازی
- فشرده بودن دکمهی

5.3.  خودکار:
خودکار:
در این حالت رلهی SYNCRO MAX PID سرعت موتور یا دیزل را کنترل کرده و تمام پارامترهای اندازهگیری شده و شرایط را نمایش میدهد و رلهی خروجی را در زمان مناسب میبندد. به عبارت دیگر تمام پروسه به صورت خودکار انجام خواهد شد.
6. صفحه و نمایشگرها
6.1. اندازهگیری
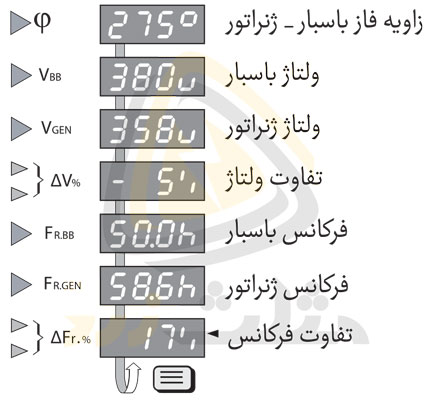
تصویر 4: پارامترهای اندازهگیری شده
\[∆V=\frac{V_{gen}-V_{bb}}{V_{bb}}\times 100\left(\%\right)\]
فرمول 1: محاسبه اختلاف ولتاژ
\[∆F=\frac{F_{gen}-F_{bb}}{F_{bb}}\times 100(\%)\]
فرمول 2: محاسبه اختلاف فرکانس
6.2. شبیه سازی
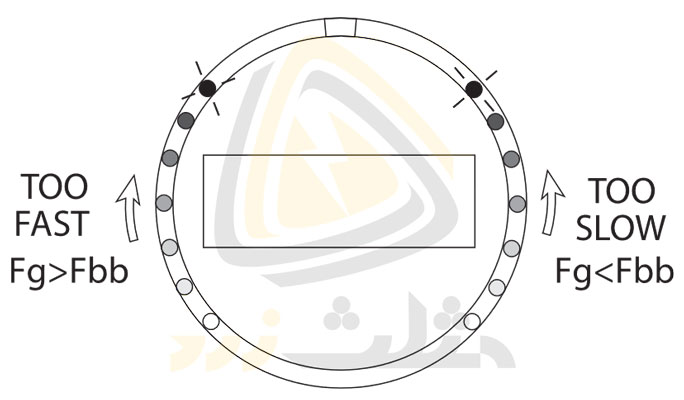
تصویر 5: شبیه سازی سرعت ژنراتور
اگر فرکانس ژنراتور بیشتر از باسبار باشد، علامت TOO FAST روشن شده و نشانگرها در جهت عقربههای ساعت و برعکس حرکت میکنند.
6.3. پیامها
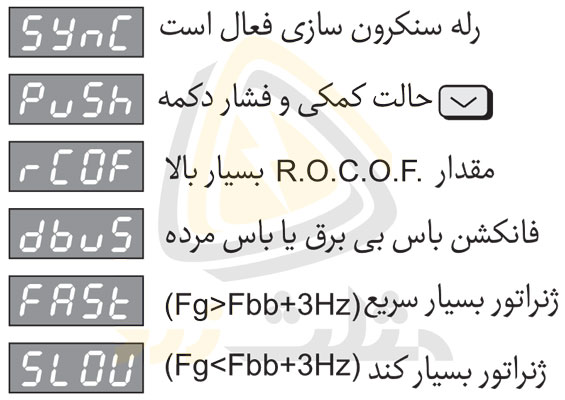
تصویر 6: پیامها
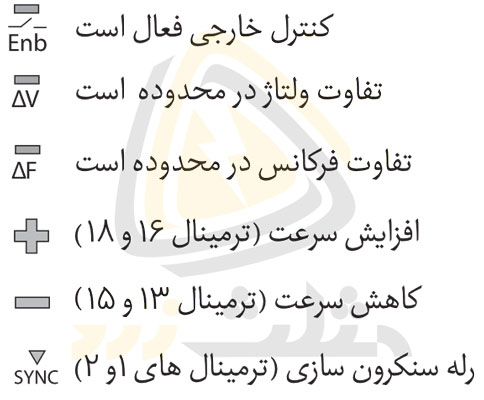
تصویر 7: سمبل ها
7. نقشه سیم بندی
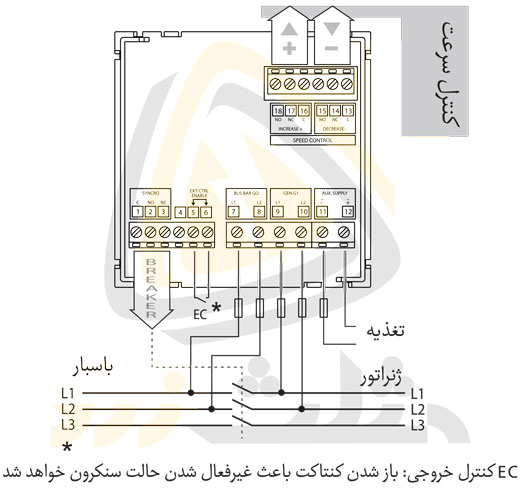
تصویر 8: نقشه سیم بندی
8. شرایط سنکرون سازی
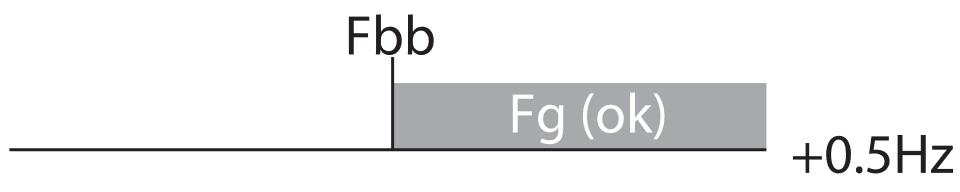
رله ی SYNCRO MAX PID جدید امکان سنکرون سازی با فرکانس ژنراتور به صورت بالاتر، پائینتر یا بدون تفاوت ولی با در نظر گرفتن شرایط باسبار را دارد. به عنوان مثال اگر بخواهیم:
جدول تنظیمات فرکانس ژنراتور نسبت به باس مرجع
| Fg همیشه بالاتر از Fbb باشد. | Fg همیشه پائین تر از Fbb باشد. | Fg بالاتر یا پائین تر از Fbb باشد. |
| Fbb<Fg<Fbb+0.5 | Fbb-0.5<Fg<Fbb | Fbb-0.5<Fg<Fbb+0.5 |
 |
 |
 |
| Fg باید بین Fbb و Fbb+0.5Hz باشد. | Fg باید بین Fbb و
Fbb-0.5Hz باشد. |
Fg باید بین Fbb-0.5Hz و Fbb+0.5Hz باشد. |
| dFnE=0.00 Hz
dFPo=0.50 Hz |
dFnE=0.50 Hz
dFPo=0.00 Hz |
dFnE=0.50 Hz
dFPo=0.50 Hz |
8.1. تاسیسات استاندارد
اگر مقادیر تنظیم شده در dFnE و dFPo کمتر از 0.10Hz باشد، سنکرون سازی بسیار دقیقی خواهیم داشت ولی این پروسه زمان بیشتری نیاز دارد.
8.2. تاسیسات اضطراری
اگر مقادیر تنظیم شده در dFnE و dFPo بالاتر از 1.00Hz باشد، سنکرون سازی بسیار سریع صورت میگیرد ولی دقت پائینی خواهد داشت.
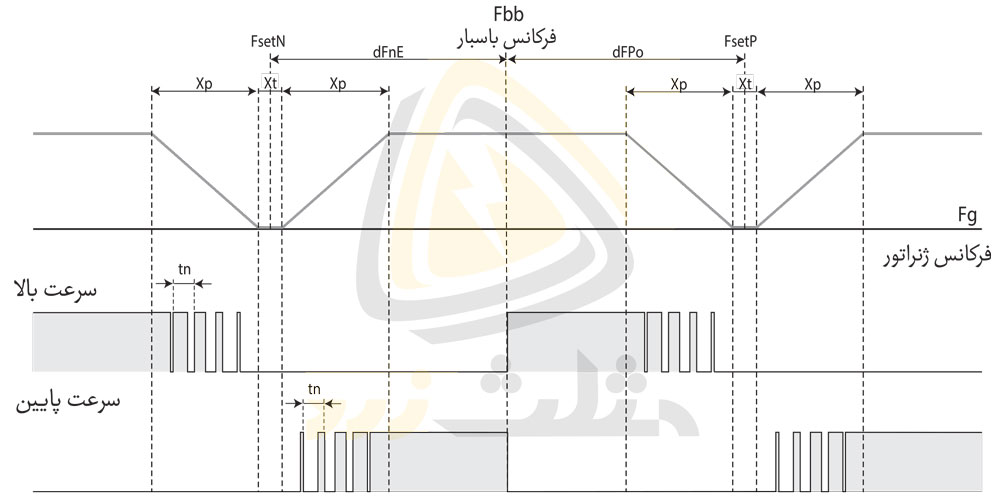
تصویر 9: مفهوم پارامترها
FsetP فرکانس ژنراتور بالاتر از باسبار
فرکانس باسبار که ژنراتور باید بالاتر از آن باشد.
FsetN فرکانس ژنراتور پائینتر از باسبار
فرکانس باسبار که ژنراتور باید پائینتر از آن باشد.
Fbb فرکانس باسبار
فرکانس باسبار که کنترل فرکانس ژنراتور مطابق با آن صورت میگیرد.
Xt حاشیه Dead band: ±0.05Hz
حاشیهای که در آن پالس سرعت بالا و پالس سرعت پائین تولید نمیشود.
9. سنکرون سازی PID
روشهای مختلفی برای محاسبهی Xp، Td و Ti وجود دارد. کلاسیکترین روش Ziegler-Nichols نام دارد. روش Ziegler-Nichols بر اساس پاسخ فرکانس بوده و شامل موارد زیر است:
ابتدا انتگرال (Ti=99.99) و مشتق (Td=0) را باطل کرده و فقط از عملکرد کنترل تناسبی Xp استفاده کنید. مقدار Xp را از صفر به مقدار بحرانی Xc افزایش داده تا نوسانات برای اولین بار ظاهر شود. با این روش حاشیه تناسبی Xc و بازهی زمانی آن یعنی Tc تعیین میشود. با این مقادیر Ziegler و Nichols پارامترهای Xp، Ti و Td را بر اساس جدول زیر محاسبه کردهاند:
جدول محاسبه پارامترها
| کنترلر | Xp | Ti | Td |
| P | 2Xc | ∞ | 0 |
| PI | 1/0.45Xc | 1./1.2Tc | 0 |
| PID | 1/0.6Xc | 0.5Tc | 0.125Tc |
10. پیکربندی رله SYNCRO MAX
10.1. کلمه عبور
هردو دکمهی ![]()
![]() برای 10 ثانیه نگهدارید. در این حالت یک کلمهی عبور 4 رقمی برای دسترسی به پیکربندی رله تنظیم خواهد شد. برای حذف کلمهی عبور باید همین پروسه را تکرار کرده و رمز را وارد کنید. جهت جلوگیری از اشتباه، کلمهی عبور باید دو مرتبه وارد شود.
برای 10 ثانیه نگهدارید. در این حالت یک کلمهی عبور 4 رقمی برای دسترسی به پیکربندی رله تنظیم خواهد شد. برای حذف کلمهی عبور باید همین پروسه را تکرار کرده و رمز را وارد کنید. جهت جلوگیری از اشتباه، کلمهی عبور باید دو مرتبه وارد شود.
10.2. تنظیمات پیش فرض
هردو دکمهی ![]()
![]() را برای 20 ثانیه نگهدارید. با این کار تنظیمات کاربر حذف شده و مقادیر پیش فرض بجای آنها قرار خواهد گرفت.
را برای 20 ثانیه نگهدارید. با این کار تنظیمات کاربر حذف شده و مقادیر پیش فرض بجای آنها قرار خواهد گرفت.
10.3. تنظیمات
جهت ورود به منوی تنظیمات، دکمهی ![]() را برای 3 ثانیه نگهدارید. این قسمت با کلمهی عبور حفاظت نمیشود. پس از ورود به منو و با استفاده از کیبورد رله میتوان به ساختار درختی تنظیمات و آلارم دسترسی پیدا کرد.
را برای 3 ثانیه نگهدارید. این قسمت با کلمهی عبور حفاظت نمیشود. پس از ورود به منو و با استفاده از کیبورد رله میتوان به ساختار درختی تنظیمات و آلارم دسترسی پیدا کرد.
 |
تائید مقدار و حرکت یک مرحله به سمت چپ ساختار درختی
حرکت یک مرحله به سمت پائین از ساختار درختی حرکت یک مرحله به سمت راست از ساختار درختی |
تصویر 10: کیبورد
نکته 3![]()
تا زمانی که در منوی پیکربندی رلهی SYNCRO MAX هستید، فانکشنها غیر فعال خواهند شد. هنگام عملکرد رله و وقتی که خروجی سنکرون بسته شده باشد، دسترسی به منو غیر فعال میگردد.
10.4. تنظیم مقادیر
- جهت حرکت بین چهار رقم از دکمهی
 استفاده کنید.
استفاده کنید. - جهت ویرایش رقم انتخاب شده از دکمهی استفاده کنید.
با استفاده از ترکیب دکمههای فوق و طبق تصویر زیر، میتوان مقدار مورد نظر را در هر پارامتر تنظیم کرد.

تصویر 11: روش تنظیم مقدار عددی
در ساختار درختی عبارتهای Min، Def و Max آورده شدهاند. مفهوم این عبارتها به این شکل است:
- Min: حداقل مقدار قابل تنظیم
- Def: مقدار پیش فرض
- Max: حداکثر مقدار قابل تنظیم
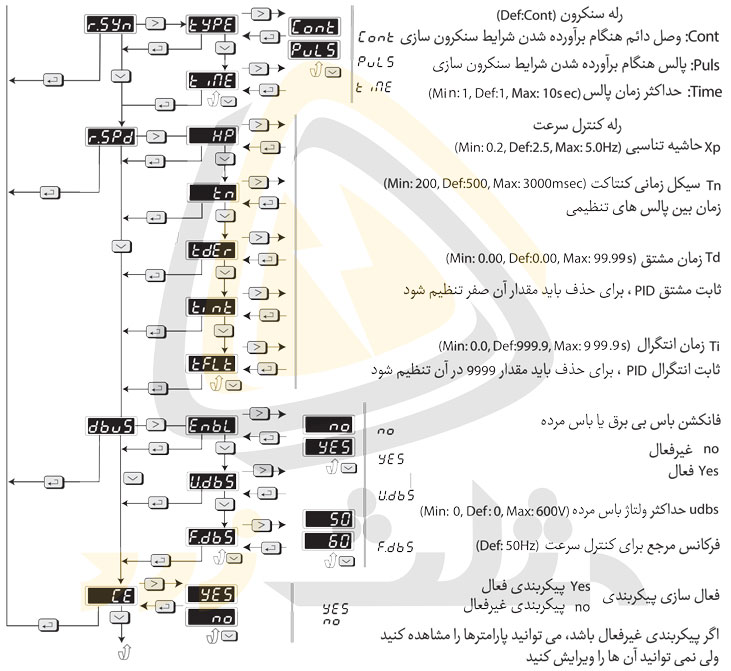
10.5. ساختار درختی پارامترها
در این بخش ساختار درختی منوها و زیر منوها آورده شده است. برای پیمایش بین منوها و تنظیم پارامترها از کیبورد دستگاه استفاده کنید.

تصویر 12: ساختار درختی تنظیمات، بخش اول
تصویر 13: ساختار درختی تنظیمات، بخش دوم
11. هشدار ایمنی
 |
قبل از هرگونه تعمیر، جابجایی یا باز کردن دستگاه باید تغذیه و مدارهای اندازهگیری به صورت کامل قطع و باز شوند. در صورت رخ دادن هرگونه خطا روی دستگاه با خدمات پس از فروش سیرکاتور تماس بگیرید.
شرکت سیرکاتور هیچ گونه مسئولیتی در خصوص بهرهبرداری اشتباه، عدم در نظر گرفتن هشدارهای ایمنی و توصیههای مطرح شده در دفترچهی راهنما، دستکاری رله توسط افراد غیر مجاز، استفاده از لوازم جانبی متفرقه و اتصالات اشتباه را ندارد. |








دیدگاه خود را ثبت کنید
تمایل دارید در گفتگوها شرکت کنید؟در گفتگو ها شرکت کنید.