تنظیم گام به گام درایو V1000
راه اندازی گام به گام درایو V1000
در این مقاله و با استفاده از نرم افزار V1000 Programming Simulator مراحل تنظیمات اولیه درایو V1000 حضورتان ارائه میشود. در صورت عدم دسترسی به این درایو لطفا نرم افزار شبیه سازی را دانلود کرده و مراحل شرح داده شده را تمرین کنید. در نظر داشته باشید که تمام این مراحل و پارامترها در هردو نسخه ی یاسکاوا و امرن درایو V1000 صادق هستند. به منظور راهاندازی درایو ابتدا باید تغذیهی آن را متصل کنید. همانطور که می دانید تغذیهی درایو با توجه توان آن به صورت تکفاز یا سه فاز خواهد بود. در نرم افزار V1000 Programming Simulator اینکار با کلیک روی دکمهی Main Power در قسمت پائین و سمت چپ انجام می شود.
- راه اندازی گام به گام درایو V1000
- وضعیت درایو
- تنظیم پارامتر سطح دسترسی و مد کنترلی درایو
- تنظیم پارامترهای روش کنترل راه اندازی
- تنظیم پارامترهای ترمز جریان DC
- تنظیم پارامترهای راه اندازی و توقف نرم
- تنظیم پارامترهای جبران سازی لغزش و گشتاور
- تنظیم پارامترهای شرایط کاری و فرکانس کریر
- تنظیم پارامترهای فرکانس کاری و فرکانس مرجع و مولتی اسپیدها
- الگوی ولتاژ/ فرکانس در حالت V/f
- تنظیم اطلاعات موتور
- برداشت اطلاعات موتور
- ورودی و خروجی های دیجیتال قابل برنامه ریزی
- ورودی و خروجی های آنالوگ قابل برنامه ریزی
- ورودی و خروجی پالس
وضعیت درایو
وضعیت درایو پس از وصل تغذیه به شرایط مختلفی بستگی دارد. در صورتی که تمام اتصالات و ورودی ها صحیح باشند درایو هیچ خطایی را نمایش نخواهد داد. به عنوان مثال به انیمیشن زیر توجه کنید. در این درایو جمپرهای اضطراری قطع بوده و پس از وصل تغذیه خطای Hbb روی صفحه نمایش داده می شود. همانطور که در مقاله ی خطایابی و رفع اشکال درایو V1000 مطالعه کردید، هنگام رخ دادن خطا یک کد روی صفحه نمایش داده شده و سیگنال ALM روشن خواهد شد. قبل از تنظیمات و به منظور مشاهده کمیت های زنده می توانید با استفاده از دکمه های جهت دار در منوهای درایو پیمایش کنید.
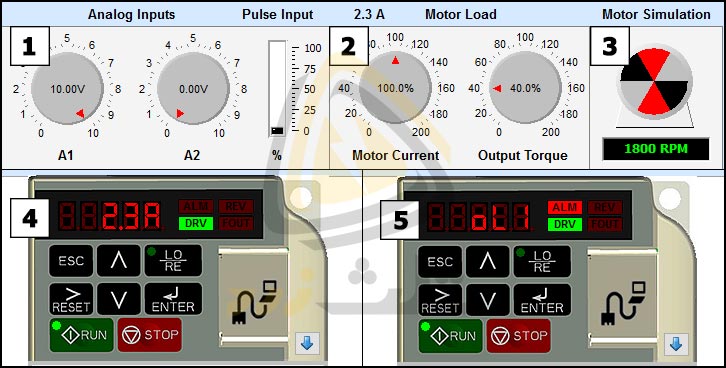
به عنوان مثال پس از صادر کردن فرمان Run به صورت محلی یا ریموت می توانید مقدار جریان الکتروموتور را به صورت زنده مشاهده کنید. به این منظور باید از کلیدهای جهت دار روی درایو استفاده کرده و جریان الکتروموتور با اندیس A را پیدا کنید. این حالت را می توانید در بخش 4 تصویر زیر با جریان 2.3A مشاهده کنید. مقدار جریان الکتروموتور به میزان بار و گشتاور آن بستگی داشته و با تغییر آن ها میزان جریان الکتروموتور افزایش یا کاهش پیدا می کند. به منظور درک بهتر این موضع لطفا به تصویر زیر توجه کنید. در این مثال فرض شده که درایو در حالت ریموت بوده و فرکانس کاری آن توسط آنالوگ های ورودی تنظیم می شود. در بخش 1 ولوم های مربوط به دو آنالوگ ورودی درایو V1000 را مشاهده می کنید که مقدار آن ها به صورت پیش فرض با یکدیگر جمع میشود.
پس از راهاندازی درایو و تنظیم فرکانس مرجع آن توسط آنالوگهای ورودی میتوانید میزان جریان الکتروموتور یا گشتاور خروجی آن را تغییر دهید. اینکار با دو پتانسیومتر نمایش داده شده در بخش 2 انجام شده و حاصل آن به صورت آمپر روی صفحه درایو قابل مشاهده خواهد بود. در این نرم افزار میزان جریان و گشتاور بین 0 تا 200 درصد قابل تنظیم هستند. همانطور که مشاهده می کنید در بحش 2، میزان جریان روی 100 درصد و گشتاور بار روی 40 درصد تنظیم شده است. این روند باعث اضافه بار شدن موتور و عملکرد رله اضافه بار الکترونیک درایو خواهد شد. در این حالت مانند بخش 5 درایو عبارت oL1 را روی صفحه نمایش داده و خروجی را قطع میکند. هنگام در رخ دادن خطا در درایو سیگنال ALM نیز روش خواهد شد.
پس از جریان خروجی مقدار ولتاژ خروجی نمایش داده می شود. این مقدار با اندیس u مشخص شده و به مد کنترلی و میزان فرکانس مرجع بستگی دارد. به عنوان مثال در مد v/f و فرکانس مرجع 60 هرتز ولتاژ خروجی درایو برابر با 230 ولت خواهد بود. در نظر داشته باشید که مقدار ولتاژ خروجی به تنظیمات دیگر مانند حداکثر ولتاژ نیز بستگی دارد.
تنظیم پارامتر سطح دسترسی و مد کنترلی درایو
پس از وصل تغذیه باید سطح دسترسی، روش کنترل الکتروموتور و پارامترهای اولیه را تنظیم کنیم. همانطور که در مقاله ی تنظیمات درایو V1000 شرح داده شد سطح دسترسی در پارامتر A1-01 تنظیم می شود. در این پارامتر سه حالت 0 فقط راه اندازی، 1 پارامترهای کاربر و 2 سطح دسترسی پیشرفته قابل انتخاب هستند. به منظور انتخاب روش کنترلی می توانید یکی از حالت های 0 ولتاژ/فرکانس، 2 وکتور کنترل حلقه باز و یا 5 حالت PM جهت موتورهای مغناطیس دائم را در پارامتر A1-02 انتخاب کنید. در نظر داشته باشید به صورت پیش فرض درایو روی حالت کنترلی ولتاژ/فرکانس ثابت یا v/f تنظیم شده است.
مرحله ی بعد انتخاب یکی از حالت های 2220 کنترل دو سیمه یا 3330 کنترل سه سیمه در پارامتر A1-03 است. در حالت دو سیمه ورودی SC1 حالت راست گرد و SC2 حالت چپ گرد را خواهد داشت. روش کنترلی در حالت 3 سیمه متفاوت بوده و به صورت پیش فرض از S1 جهت استارتر، S2 استپ و S5 حالت چپ گرد استفاده می شود. در نظر داشته باشید در همین پارامتر و با انتخاب عدد 1110 می توانید درایو V1000 را ریست کرده و با تنظیمات کارخانه بازگردانی کنید.
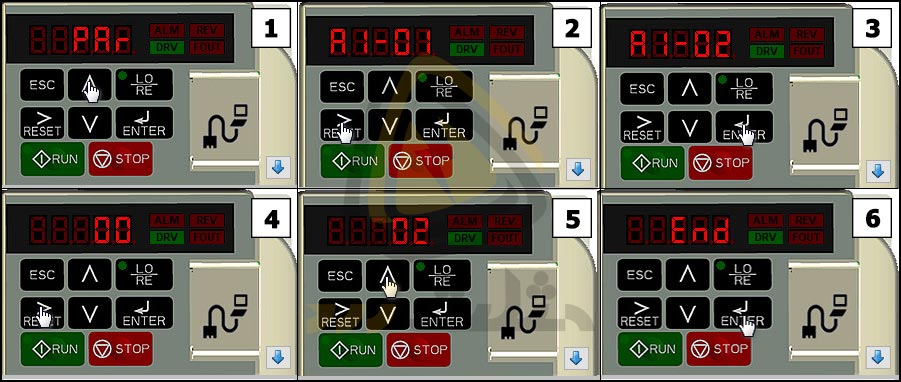
به عنوان مثال تنظیم پارامتر A1-02 توسط برنامه شبیه سازی در تصویر زیر نمایش داده شده است. این مراحل دقیقا شبیه به کار با کیبورد درایو است.
- بخش 1: با چندین بار فشردن دکمه جهت بالا به منوی پارامتر یا PAr می رسیم. برای وارد شدن به این پارامتر باید دکمه Enter را فشار دهیم.
- بخش 2: در این حالت اولین پارامتر یعنی A1-01 نمایش داده می شود. برای تغییر عدد 01 به 02 باید از دکمه ریست یا جهت سمت راست استفاده کنیم. این کار باعث چشمک زدن عدد 01 می شود.
- بخش 3: با دکمه های جهت دار عدد 02 را انتخاب کرده و دکمه Enter را فشار می دهیم.
- بخش 4: در این حالت مقدار قبلی پارامتر نمایش داده می شود. به منظور تغییر مقدار پارامتر باید استفاده از دکمه Reset مقدار یکان 00 را انتخاب کنیم.
- بخش 5: به عنوان مثال با دکمه ی بالا عدد 2 به معنی وکتور کنترل حلقه باز را در این پارامتر تنظیم میکنیم.
- بخش 6: با فشردن دکمه Enter مقدار جدید در پارامتر ثبت خواهد شد.
هنگام تنظیم پارامترها به مقادیر قابل قبول در آن ها توجه کنید. به عنوان مثال هر عددی به غیر از 0، 2 و 5 در پارامتر A1-02 ذخیره نخواهند شد. به عبارت دیگر پس از وارد کردن مقدار اشتباه و فشردن دکمه Enter، مقدار پارامتر به حالت قبل بازگشته و تغییری نخواهد کرد. در صورت مشاهده این حالت حتما به لیست پارامترها مرجعه کرده و مقادیر قابل قبول در هر پارامتر را مشاهده کنید.
به منظور ریست درایو V1000 و بازگردانی تنظیمات آن به مقادیر کارخانه باید عدد 1110 را در پارامتر A1-03 ثبت کنیم.
تنظیم پارامترهای روش کنترل راه اندازی
درایو می تواند با فرکانس های مختلفی کار کرده و دور الکتروموتور را با توجه به شرایط موجود تنظیم کند. این فرکانس از طریق روش های مختلفی مانند مقادیر ثابت، کیبورد، ورودی آنالوگ، پالس، شبکه و غیره تعیین خواهد شد. انتخاب منبع دریافت فرکانس مرجع در هر درایو متفاوت بوده و در سری V1000 توسط پارامتر B1-01 مشخص می شود. مقادر این پارامتر به صورت پیش فرض روی 1 یا ورودی های آنالوگ است. در تصویر زیر مراحل تنظیم منبع فرکانس ورودی از طریق نرم افزار شبیه سازی را مشاهده می کنید.
در بخش یک از تصویر ابتدا وارد منو شده و پارامتر B1-01 را انتخاب می کنیم. طبق بخش 2؛ برای کنترل فرکانس کاری از طریق ورودی پالس این پارامتر باید روی عدد 4 تنظیم شود. قابل ذکر است میزان پالس ورودی را می توانید با اسلایدر شماره 3 در بازه 0 تا 100 درصد تنظیم کنید. در بخش 4 مشاهده می کنید که میزان فرکانس تنظیم شده از طریق ورودی پالس معادل 58.80 هرتز است.

علاوه بر میزان فرکانس کاری درایو باید منبع فرمان راه اندازی و توقف آن را نیز تنظیم کنیم. فرمان های راه اندازی و توقف می تواند توسط ورودی های دیجیتال، دکمه های روی کیبورد و غیره صادر شود. تنظیم منبع دریافت فرمان راه اندازی و توقف در پارامتر B1-02 انجام می شود. این پارامتر به صورت پیش فرض روی 1 یا ورودی های دیجیتال است. به عنوان مثال می توان مقدار این پارامتر را روی 0 یعنی کنترل از طریق دکمه های RUN و STOP روی کیبورد تنظیم کرد. قابل ذکر است که حالت STOP در 2 مد کنترل محلی و کنترل از راه دور از روی درایو عمل خواهد کرد. این کار بعلت افزایش ایمنی و توانایی قطع درایو در حالت های اضطراری در نظر گرفته شده است.
از گروه پارامترهای B1 می توان به B1-04 یا جهت گردش الکتروموتور اشاره کرد. در حالت پیش فرض پارامتر روی 0 بوده و هردو جهت راستگرد و چپ گرد پذیرفته خواهد بود. با قرار دادن این پارامتر روی 1 تغییر جهت گردش انجام نشده و الکتروموتور فقط در یک جهت کار می کند.
تنظیم پارامترهای ترمز جریان DC
همانطور که می دانید در درایو ابتدا جریان AC یکسو شده و در ادامه جریان DC به AC تبدیل می شود. با توجه به این شرایط همواره در درایو یک باس DC در دسترس است. از این مزیت می توان در ترمز الکترموتور استفاده کرده و پارامترهای مربوط به آن را تنظیم کرد. پارامترهای بخش ترمز در درایو V1000 در گروه B قرار دارند. به عنوان مثال در پارامتر B2-01 می توان فرکانس شروع تزریق جریان DC را مشخص کرد. به عبارت دیگر در حال توقف یا Deceleration و هنگامی که درایو به این فرکانس برسد تزریق جریان DC آغاز خواهد شد.
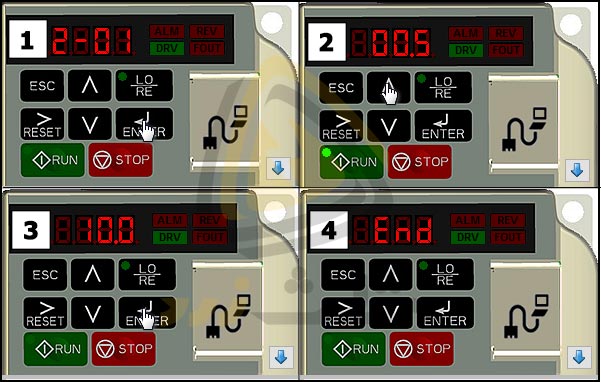
فرکانس شروع تزریق جریان DC به صورت پیش فرض روی 0.5 هرتز تنظیم شده است. در تصویر زیر مراحل تنظیم این فرکانس روی 10 هرتز را مشاهده می کنید. با اینکار در هنگام توقف و رسیدن فرکانس خروجی درایو به 10 هرتز تزریق جریان DC آغاز می شود. طبق بخش 1 تصویر زیر ابتدا باید وارد پارامتر B2-01 شویم. همانطور که در بخش 2 مشاهده می کنید مقدار این فرکانس روی 0.5 هرتز است. با دکمه های جهت دار مقدار این فرکانس را روی 10 هرتز تنظیم کرده و دکمه Enter را فشار می دهیم. نمایش عبارت End در بخش 4 به معنی ثبت موفقیت آمیز مقدار جدید است.
ترمز DC نیاز به تنظیم پارامترهای دیگر مانند قدرت، زمان و غیره دارد. به عنوان مثال در پارامتر B2-02 جریان ترمز DC بر حسب ضریبی از جریان نامی درایو تنظیم می شود. در نظر داشته باشید که به صورت پیش فرض مقدار این پارامتر روی 50 درصد است. عدد 50 در این پارامتر به معنی تزریق جریان DC به مقدار 50 درصد جریان نامی درایو است. در صورتی نامناسب بودن گیرایی ترمز می توانید این پارامتر را تنظیم کنید. در نظر داشته باشید که ترمزهای مکرر با جریان بالا باعث گرم شدن سیم پیچ الکتروموتور خواهد شد.
ترمز DC فقط مربوط به پروسه توقف الکتروموتور نبوده و قبل از راه اندازی نیز قابل اجرا است. در این حالت با فرمان راه اندازی ابتدا جریان DC به موتور اعمال شده و در ادامه راه اندازی آغاز می شود. از ترمز قبل از راه اندازی جهت کاهش استهلاک، اطمینان از ثابت بودن موتور قبل از شروع به کار و غیره استفاده می شود. ترمز قبل از راه اندازی در درایو V1000 توسط پارامتر B2-03 تنظیم می شود. مقدار این پارامتر در حال پیش فرض روی 0 یا غیر فعال است.
واحد این پارامتر زمان بوده و با تنظیم آن مقدار ترمز قبل از راه اندازی مشخص می شود. به عنوان مثال تنظیم عدد 5 در این پارامتر به معنی ترمز قبل از راه اندازی به مدت 5 ثانیه است. در این حالت با صدور فرمان RUN ابتدا به مدت زمان 5 ثانیه جریان DC به موتور اعمال شده و در ادامه روند راه اندازی یا acceleration آغاز میشود.
زمان تزمز DC پس از توقف در پارامتر B2-04 تنظیم می شود. واحد این پارامتر نیز زمان بوده و مربوط به تزریق جریان DC پس از توقف کامل الکتروموتور است. به عنوان مثال تنظیم عدد 10 در این پارامتر به معنی ترمز پس از توقف کامل به مدت 10 ثانیه است. در نظر داشته باشید این ترمز پس از فرمان stop و گذشت زمان deceleration فعال خواهد شد.
تنظیم پارامترهای راه اندازی و توقف نرم
یکی از ویژگی های اصلی درایو راه اندازی و توقف نرم است. این پروسه با کمیت های مختلفی مانند میزان فرکانس، ولتاژ و زمان تنظیم می شود. به عنوان مثال می توان زمان راه اندازی یعنی رسیدن الکتروموتور از فرکانس 0 تا فرکانس مرجع را تنظیم کرد. این ویژگی با عنوان های مختلف مانند زمان شتاب گرفتن، زمان راه اندازی یا acceleration شناخته می شود. در طرف مقابل پروسه توقف نرم قرار دارد. زمان این پروسه نیز قابل تنظیم بوده و با عنوان های مختلف مانند زمان توقف یا deceleration شناخته می شود. در نظر داشته باشید که هر درایو ممکن است چندین زمان مختلف برای راه اندازی و توقف داشته باشد. این زمان ها با توجه به شرایط تاسیسات و به شکل های مختلفی قابل انتخاب هستند.
در درایو V1000 می توان چهار زمان راه اندازی و چهار زمان توقف را در پارامترهای C1-01 تا C108 تنظیم کرد. انتخاب این زمان ها می تواند با ورودی های دیجیتال یا شبکه انجام شود. اولین زمان راه اندازی در پارامتر C1-01 تنظیم شده که مقدار پیش فرض آن 10 ثانیه است. این پارامتر به معنای مدت زمان راه اندازی بعد از فرمان run تا رسیدن به فرکانس مرجع است. به عبارت دیگر در حالت پیش فرض راه اندازی از دریافت فرمان RUN تا رسیدن به فرکانس مرجع 10 ثانیه زمان خواهد برد.
میزان اولین زمان توقف پس از دریافت فرمان Stop در پارامتر C1-02 تنظیم می شود. این پارامتر نیز به صورت پیش فرض روی 10 ثانیه بوده و معرف توقف الکتروموتور از فرمان Stop تا 10 ثانیه است. با قرار دادن این پارامتر روی عدد 0 پس از دریافت فرمان Stop الکتروموتور بالافاصله متوقف خواهد شد. پارامترهای مربوط به راه اندازی و توقف به این ترتیب تنظیم می شوند:
- C1-01 و C1-02 به ترتیب زمان شتاب گیری و توقف شماره 1
- C1-03 و C1-04 به ترتیب زمان شتاب گیری و توقف شماره 2
- C1-05 و C1-06 به ترتیب زمان شتاب گیری و توقف شماره 3
- C1-07 و C1-08 به ترتیب زمان شتاب گیری و توقف شماره 4
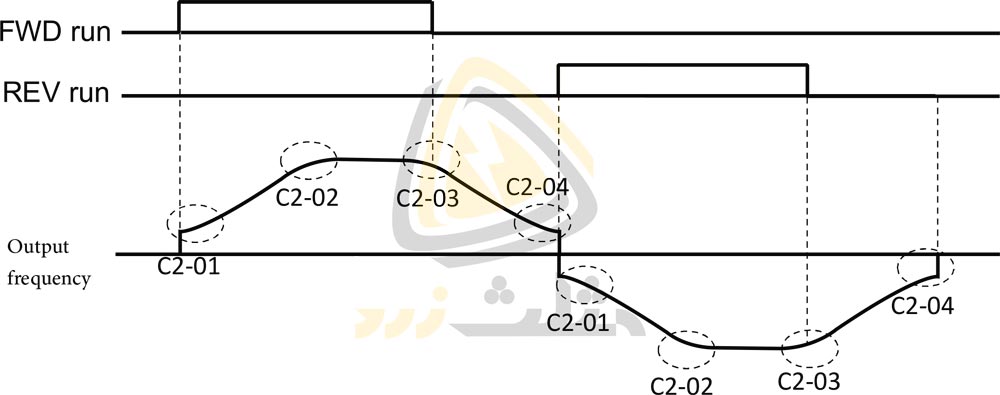
با تنظیم زمان راه اندازی و توقف خطوطی با شیب های مختلف تعریف می شود. این خطوط میزان تغییرات فرکانس نسبت به زمان را نشان داده و دارای لبه های تیز هستند. از پارامترهای C2-01 تا C2-04 می توان به منظور نرم کردن لبه های منحنی استفاده کرد. محدوده ی عملکرد این پارامترها در تصویر زیر نمایش داده شده است. به عنوان مثال پارامتر C2-01 برای نرم کردن منحنی هنگام شروع راه اندازی نرم است. در ادامه پارامتر C2-02 انحنای لبه ی پایان راه اندازی نرم و رسیدن به فرکانس مرجع را تنظیم می کند. این روند برای پروسه توقف نیز از طریق پارامترهای C2-03 و C2-04 قابل انجام است.
تنظیم پارامترهای جبران سازی لغزش و گشتاور
پس از پارامترهای زمان راه اندازی و توقف در گروه C1 و نرم کردن منحنی ها در گروه C2، پارامترهای جبران سازی لغزش و گشتاور وجود دارند. جبران سازی لغزش و گشتاور به ترتیب در پارامترهای C3 و C4 تنظیم می شوند. به عنوان مثال به منظور جبران سازی لغزش می توان از پارامتر C3-01 استفاده کرد. این پارامتر به صورت پیش فرض روی 0 قرار داشته و در بازه 0 تا 2.5 قابل تنظیم است. جبران سازی لغزش به منظور تنظیم دور الکتروموتور با توجه به فرکانس اعمال شده به آن بسیار مهم است.
تصور کنید که با اعمال فرکانس 50 هرتز دور الکتروموتور کمتر از حالت استاندارد باشد. در حقیقت این امر به معنی لغزش زیاد بوده که می توان مقدار آن را با پارامتر C3-01 جبران کرد. در صورت بالا بودن سرعت الکتروموتور در رابطه با فرکانس اعمال شده می توان مقدار جبران سازی لغزش را کاهش داد. پارامتر C3-02 جهت تنظیم زمان تاخیر در جبران سازی است. این پارامتر به صورت پیش فرض مقدار 2000 را داشته و در صورت کندی جبران سازی می توانیم مقدار آن را کاهش دهیم. در نظر داشته باشید که در صورت عدم پایداری سرعت باید این مقدار افزایش داده شود.
پارامترهای مربوط به جبران سازی گشتاور نیز شبیه به جبران سازی لغزش تنظیم می شوند. پارامتر C4-01 تنظیم جبران سازی گشتاور و C4-02 زمان تاخیر آن است. مقدار پیش فرض جبران سازی گشتاور 1 بوده و در صورت کندی پاسخ گشتاور می توان آن را افزایش داد. این حالت به صورت عکس نیز صادق است. به عبارت دیگر در صورت عدم پایداری گشتاور در سرعت های مختلف باید مقدار جبران سازی گشتاور را کاهش دهیم. زمان تاخیر در جبران سازی نیز به رفتار الکتروموتور بستگی دارد. در صورت نوسان در سرعت/گشتاور می توان مقدار این پارامتر را افزایش داده و در صورت کندی پاسخ گشتاور مقدار آن را کاهش داد.
تنظیم پارامترهای شرایط کاری و فرکانس کریر
تنظیم شرایط کاری نرمال یا سنگین به همراه فرکانس کریرها در گروه C6 انجام می شود. در پارامتر C6-01 می توان مد کاری درایو را از بین حالت های heavy duty و normal duty انتخاب کرد. مقدار پیش فرض این پارامتر عدد 1 به معنی حالت کاری نرمال است. در صورت استفاده از درایو در شرایط سنگین باید این پارامتر را روی 0 تنظیم کنید. در نظر داشته باشید که در حالت شرایط کاری سنگین موتور 150 درصد اضافه بار را در 60 ثانیه تحمل می کند. این مقدار در حالت کاری نرمال معادل 120 درصد اضافه بار را در 60 ثانیه است. این مسائل را می توانید در نرم افزار شبیه سازی با تغییرات میزان جریان و گشتاور اعمال به موتور مشاهده کنید.
پارامتر C6-02 مربوط به فرکانس کریرها است. این مقدار به صورت پیش فرض روی عدد 7 به معنای حالت شناور نسبت به PWM 1 تا 4 تنظیم شده است. همانطور که در راهنمای فارسی درایو V1000 شرح داده شد این پارامتر می تواند بین 1 تا 6 با فرکانس های 2 تا 15 کیلو هرتز تنظیم شود. در صورت افزایش طول کابل به بیشتر از 100 متر توصیه می شود مقدار این پارامتر را بین 2 تا 5 تنظیم کنید. در نظر داشته باشید که با افزایش فرکانس کریرها لبه های شکل موج نرم تر شده ولی با طولانی تر شدن کابل ها تلفات خازنی در آن ها افزایش پیدا می کند.
تنظیم پارامترهای فرکانس کاری و فرکانس مرجع و مولتی اسپیدها
فرکانس مرجع یا فرکانس کاری در درایو به شکل های مختلفی مشخص می شود. به عنوان مثال می توان فرکانس را از طریق شبکه، ورودی های آنالوگ، پالس و یا سرعت های چندگانه تنظیم کرد. سرعت های چندگانه یا مولتی اسپید یا Multi Speed یکی دیگر از روش های تنظیم فرکانس از طریق ورودی های دیجیتال است. در این حالت چندین فرکانس از قبل تنظیم شده؛ با ورودی های دیجیتال و به صورت باینری انتخاب می شوند. به صورت کلی در درایو V1000 می توان شانزده سرعت مختلف را از طریق ورودی های دیجیتال به عنوان فرکانس کاری در نظر گرفت. ورودی های دیجیتال دارای فانکشن های قابل انتخاب هستند. این فانکشن ها در پارامترهای H1-01 تا H1-06 تنظیم شده و به هر ورودی یک نقش خاص می دهد. به عنوان مثال فانگشن های ورودی های دیجیتال S5 و S6 به صورت پیش فرض جهت فعال کردن سرعت های 3 و 4 مولتی اسپیدها هستند.
از طرفی فرکانس های مولتی اسپیدها نیز دارای مقدار از پیش تنظیم شده بوده و باید در پارامترهای D1-01 تا D1-16 توسط کاربر ثبت شوند. به عنوان مثال تصور کنید مقدار فرکانس مولتی اسپیدهای D1-02 روی 10 هرتز، D1-03 روی 20 هرتز و D1-04 روی 30 هرتز تنظیم شده باشند. در این حالت و با فرض بر عدم تغییر فانکشن های ورودی دیجیتال؛ با فعال کردن ورودی S5 فرکانس کاری درایو معادل 10 هرتز خواهد شد. با فعال کردن ورودی دیجیتال S6 این فرکانس به 20 هرتز رسیده و در صورت فعال بودن هم زمان S5 و S6 به مقدار 30 هرتز خواهد رسید.
همانطور که مشاهده می کنید انتخاب این فرکانس ها از طرق ورودی های دیجیتال به صورت باینری انجام می شود. به عبارت دیگر با تعریف 4 ورودی دیجیتال به عنوان مولتی اسپید ها می توان 16 سرعت مختلف را انتخاب کرد. در جدول زیر وضعیت 4 ورودی دیجیتال و انتخاب سرعت های چندگانه را مشاهده می کنید. در این جدول H1-xx معرف ورودی دیجیتال مورد نظر شما است که باید با فانکشن های 3، 4، 5 و 32 تنظیم شوند. در نظر داشته باشید که پارامتر D1-17 مربوط به فرکانس جاگ است. فرکانس جاگ را می توان با فانکشن 6 توسط یکی از ورودی های دیجیتال انتخاب کرد.
| فرکانس مرجع | مولتی اسپید
H1-xx=3 |
مولتی اسپید 2
H1-xx=4 |
مولتی اسپید 3
H1-xx=5 |
مولتی اسپید 4
H1-xx=32 |
| فرکانس مرجع 1 (D1-01) | 0 | 0 | 0 | 0 |
| فرکانس مرجع 2 (D1-02) | 1 | 0 | 0 | 0 |
| فرکانس مرجع 3 (D1-03) | 0 | 1 | 0 | 0 |
| فرکانس مرجع 4 (D1-04) | 1 | 1 | 0 | 0 |
| فرکانس مرجع 5 (D1-05) | 0 | 0 | 1 | 0 |
| فرکانس مرجع 6 (D1-06) | 1 | 0 | 1 | 0 |
| فرکانس مرجع 7 (D1-07) | 0 | 1 | 1 | 0 |
| فرکانس مرجع 8 (D1-08) | 1 | 1 | 1 | 0 |
| فرکانس مرجع 9 (D1-09) | 0 | 0 | 0 | 1 |
| فرکانس مرجع 10 (D1-10) | 1 | 0 | 0 | 1 |
| فرکانس مرجع 11 (D1-11) | 0 | 1 | 0 | 1 |
| فرکانس مرجع 12 (D1-12) | 1 | 1 | 0 | 1 |
| فرکانس مرجع 13 (D1-13) | 0 | 0 | 1 | 1 |
| فرکانس مرجع 14 (D1-14) | 1 | 0 | 1 | 1 |
| فرکانس مرجع 15 (D1-15) | 0 | 1 | 1 | 1 |
| فرکانس مرجع 16 (D1-15) | 1 | 1 | 1 | 1 |
الگوی ولتاژ/ فرکانس در حالت V/f
الگوی نسبت فرکانس/ولتاژ می تواند به صورت خطی کامل بوده و یا دارای شکستگی های خاص باشد. همانطور که در تصویر زیر مشاهده می کنید این الگو توسط نقاط مختلف در پارامترهای گروه E1 تعریف می شود. اولین پارامتر از گروه E1 یعنی E1-01 مربوط به ولتاژ ورودی سیستم است. در پارامترهای بعدی می توان نقاط مختلفی تعریف کرده و در نتیجه الگوی V/F را ترسیم کرد. پارامترهای تشکیل دهنده ی این الگو در درایو عبارتند از:
- E1-01 ولتاژ ورودی سیستم
- E1-04 حداکثر فرکانس خروجی
- E1-05 حداکثر ولتاژ خروجی
- E1-06 فرکانس پایه
- E1-07 فرکانس میانی
- E1-08 ولتاژ خروجی میانی
- E1-09 حداقل فرکانس خروجی
- E1-10 حداقل ولتاژ خروجی
- E1-13 ولتاژ پایه
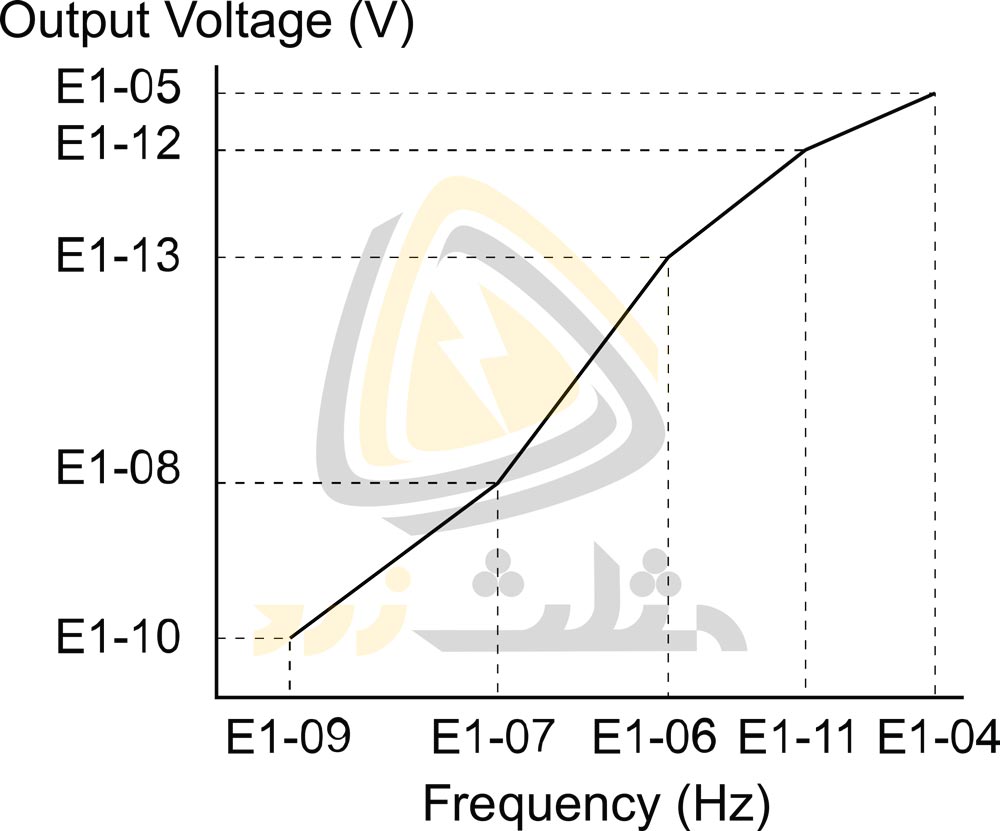
با تنظیم پارامترهای فوق می توان نسبت ولتاژ و فرکانس خروجی را در حالت کاری V/F مشخص کرد. در نظر داشته باشید که هنگام تنظیمات باید رابطه ی زیر صادق باشد. در صورت مغایر بودن تنظیمات خطای اپراتور فعال شده و درایو فرمان راه اندازی را قبول نخواهد کرد.
\(E1 – 04\; \ge E1 – 06\; \ge E1 – 07 \ge E1 – 09\)
تنظیم اطلاعات موتور
درایو V1000 می توانند با قابلیت Auto Tuning اطلاعات مربوط به الکتروموتور را به صورت خودکار برداشت کند. برداشت خودکار اطلاعات با توجه به شرایط الکتروموتور و بار متصل شده به آن می تواند به صورت های چرخشی، بدون چرخش و حالت بهینه از نظر مصرف انرژی انجام شود توصیه می شود برداشت خودکار به صورت چرخشی و بدون بار انجام شود تا اطلاعات برداشت شده دقیق و کامل باشند. روش Auto Tuning در حالت شبیه سازی امکان پذیر نبوده و برای بررسی شرایط کاری باید پارامترهای موتور به صورت دستی تنظیم شوند. قابل ذکر است که در حالت واقعی نیز اگر برداشت خودکار قابل اجرا نباشد باید از تنظیم دستی پارامترها استفاده کنیم. پارامترهای مربوط به الکتروموتور در گروه E2 قرار می گیرند. این پارامترها عبارتند از:
- E2-01 جریان نامی یا بار کامل
- E2-02 لغزش موتور بر حسب فرکانس
- E2-03 جریان بی باری موتور
- E2-04 تعداد قطب های موتور
- E2-05 مقاومت خط به خط یا مقاومت سیم پیچ بر حسب اهم
- E2-06 اندوکتانس نشتی
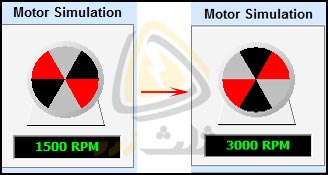
در تصویر زیر روند تغییر تعداد قطب های الکتروموتور در پارامتر E2-04 را مشاهده می کنید. در بخش 1 ابتدا وارد پارامتر مورد نظر شده و در بخش 2 مقدار قبلی آن را مشاهده می کنیم. طبق بخش 3 تعداد قطب ها از 4 به مقدار 2 کاهش داده می شود. با زدن دکمه Enter مقدار جدید در پارامتر ثبت شده و عبارت End روی صفحه نمایش داده می شود. با فرمان راه اندازی مشاهده می کنید که سرعت الکتروموتور از 1500 دور به 3000 دور افزایش پیدا می کند. البته میزان سرعت به فرکانس نیز بستگی دارد.

برداشت اطلاعات موتور
برای تعیین مدهای برداشت خودکار اطلاعات موتور یا Auto Tuning باید پارامتر T1-01 را تنظیم کنیم. تنظیم این پارامتر روی 0 به معنای برداشت اطلاعات در حالت چرخشی و در بی باری کامل موتور است. در نظر داشته باشید که این روش باعث چرخش الکتروموتور شده و ممکن است خطراتی را در پی داشته باشد. در صورتی که امکان چرخش موتور یا جدا کردن بار آن وجود نداشته باشد می توانید این پارامتر را روی 2 تنظیم کنید. در این صورت برداشت اطلاعات بدون چرخش الکتروموتور انجام خواهد شد. تنظیم پارامتر T1-01 روی مقدار 3 به معنی برداشت اطلاعات با چرخش الکتروموتور در بی باری کامل با کمترین مصرف انرژی است.
پس از تنظیم و تائید گزینه مورد نظر خود در پارامتر T1-01 باید از دکمه های جهت دار استفاده کرده و گزینه ی run13 را پیدا کنید. در این حالت با زدن دکمه RUN درایو شروع به برداشت خودکار اطلاعات موتور می کند. پس از کامل شدن این پروسه عبارت End روی صفحه نمایش داده شده و اطلاعات در پارامترهای مربوطه ثتب می شوند.
در نظر داشته باشید ممکن است برخی از حالت های برداشت خودکار بعلت پارامترهای دیگر قابل انتخاب نباشند. به عنوان مثال اگر درایو در مد کنترل وکتور باشد عدد 0 در پارامتر T1-01 قابل انتخاب نیست. در این حالت باید پارامتر A1-02 را روی 2 تنظیم کرده و سپس پارامتر T1-01 را روی مقدار 0 تنظیم کنیم. پس از طی این مراحل باید با استفاده از دکمه های جهت دار گزینه ی run10 را انتخاب کرده و دکمه ی Enter را فشار دهیم. در این مرحله می توان دکمه RUN را فشار داده و پروسه برداشت خودکار اطلاعات موتور را راه اندازی کرد.
ورودی و خروجی های دیجیتال قابل برنامه ریزی
درایو V1000 دارای 6 ورودی دیجیتال با عنوان های S1 تا S6 و یک پایانه مشترک با عنوان SC است. این ورودی ها می توانند به صورت PNP یا NPN در مدار فرمان استفاده شوند. به صورت پیش فرض ورودی S1 راست گرد، S2 چپ گرد، S3 خطای خارجی، S4 ریست، S5 مولتی اسپید 3 و S6 مولتی اسپید 4 است. در نرم افزار شبیه سازی می توانید با اشاره موس به هر یک از ورودی ها حالت کنترلی آن را مشاهده کنید.
برای تنظیم ورودی های دیجیتال باید فانکشن مناسب را در پارامترهای H1-01 تا H1-06 انتخاب کنیم. مقادیر قابل تنظیم برای ورودی های دیجیتال در دفترچه کامل راه اندازی درایو آورده شده است. در صورتی که این پارامترها به درستی تنظیم نشوند خطای اپراتور نمایش داده می شود. توصیه می شود در صورت عدم استفاده از یک ورودی دیجیتال مقدار آن را روی F یا بدون استفاده قرار دهید.
درایو V1000 دارای یک رله ی خروجی و 2 خروجی الکترونیک به صورت فوتوکوپلر است. پارامتر H2-01 به منظور انتخاب فانکشن رله خروجی و پارامترهای H2-02 و H3-03 جهت انتخاب فانکشن خروجی فوتوکوپلرها استفاده می شوند. به عنوان مثال پارامتر H2-01 در حالت پیش فرض روی E یا خطا تنظیم شده است. در این صورت رخ دادن هرگونه خطا باعث روش شدن LED و تغییر وضعیت رله خواهد شد.
ورودی و خروجی های آنالوگ قابل برنامه ریزی
درایو V1000 مجهز به ورودی و خروجی های آنالوگ قابل برنامه ریزی می باشد. این آنالوگ ها اصطلاحا مولتی فانکشن بوده و می توان پارامترهای مربوط به آن ها را در بخش H3 و H4 تنظیم کرد. قابل ذکر است که از آنالوگ های ورودی جهت کنترل پیوسته ی درایو استفاده می شود. این سیگنال می تواند از پی ال سی، سنسورها و یا ادوات آنالوگ دیگر به درایو منتقل شود. به عنوان مثال یک پی ال سی می تواند از طریق ورودی آنالوگ فرکانس کاری درایو را تنظیم کند.
در طرف مقابل خروجی های آنالوگ قرار دارند. این خروجی ها جهت مانیتور کردن وضعیت الکتروموتور یا درایو بوده و می توانند به پی ال سی، سیستم مانیتورینگ و غیره متصل شوند. به عنوان مثال می توان از طریق یک پی ال سی جریان دریافتی الکتروموتور را کنترل کرد.
گروه H3 مربوط به ورودی های آنالوگ بوده و پارامترهای آن ها به شرح زیر هستند:
- H3-01 سطح سیگنال ورودی آنالوگ اول: این مقدار به صورت پیش فرض روی صفر تنظیم شده است. در حالت صفر ورودی های منفی لحاظ نشده و در صورت نیاز به ورودی سیگنال منفی باید آن را در حالت 1 تنظیم کنیم. یکی از حالت های کاری در بازه مثبت و منفی استفاده از یک پتانسیومتر در کنترل همزمان سرعت و جهت گردش الکتروموتور است.
- H3-02 جهت تنظیم فانکشن ورودی آنالوگ اول: در این بهش مشخص می شود که این ورودی تنظیم کننده ی چه کمیتی مانند فرکانس، ولتاژ، گشتاور، ورودی سنسور PTC و غیره است.
- H3-03 تنظیم مقدار ورودی آنالوگ بر حسب درصد در 10 ولت
- H3-04 تنظیم مقدار ورودی آنالوگ بر حسب درصد در 0 ولت
- H3-09 انتخاب جریانی یا ولتاژی بودن سیگنال آنالوگ ورودی دوم
- H3-10 جهت تنظیم فانکشن ورودی آنالوگ دوم: در این بهش مشخص می شود که این ورودی تنظیم کننده ی چه کمیتی مانند فرکانس، ولتاژ، گشتاور، ورودی سنسور PTC و غیره است.
- H3-11 تنظیم مقدار ورودی آنالوگ بر حسب درصد در 10 ولت و 20 میلی آمپر
- H3-12 تنظیم مقدار ورودی آنالوگ بر حسب درصد در 0 ولت و 4 میلی آمپر
گروه H4مربوط به خروجی های آنالوگ بوده و پارامترهای آن ها به شرح زیر هستند:
- H4-01: این پارامتر به صورت پیش فرض روی 102 یعنی مانیتور کردن فرکانس خروجی تنظیم شده است.
- H4-02 و H4-03: این پارامترها جهت تعیین حد بالا و پائین سیگنال آنالوگ استفاده می شوند.
ورودی و خروجی پالس
درایو V1000 علاوه بر ورودی و خروجی های دیجیتال و آنالوگ مجهز به ورودی و خروجی پالس نیز می باشد. این قابلیت امکان کنترل و مانیتور کردن وضعیت درایو را بر اساس پالس فراهم می کند. به عنوان مثال می توان پالس های خروجی پی ال سی یا انواع انکودر و ادوات دیگر را به منظور تنظیم فرکانس کاری درایو یا انواع فید بک استفاده کرد. در طرف مقابل می توان پالس های خروجی درایو را به منظور مانیتور کردن وضعیت درایو و الکتروموتور به کار برد.
همانطور که در ابتدای مقاله شرح داده شد؛ منبع تنظیم کننده فرکانس کاری در پارامتر B1-01 انتخاب می شود. قرار دادن این پارارمتر روی عدد 4 به معنی دریافت فرکانس کاری از طریق پالس است. تنظیمات ورودی و خروجی پالس در گروه H6 قرار میگیرد. برخی از پارامترهای این گروه عبارتند از:
- H6-01: این پارامتر به صورت پیش فرض روی 0 قرار داشته و جهت تنظیم فرکانس کاری استفاده می شود. برخی دیگر از فانکشن های قابل انتخاب عبارتند از عدد 1 جهت دریافت فیدبک PID، عدد 2 جهت دریافت فرکانس کاری از PID و عدد 3 جهت دریافت فیدبک سرعت در کنترل V/f
- H6-02 مقدار پالس های ورودی بر اساس هرتز که تنظیم کننده ی 100 درصد کمیت قابل کنترل است.
- H6-03 و H6-04 تعیین حد بالا و پایین پائین پالس ورودی
- H6-06 فانکشن خروجی پالس جهت مانیتور کردن مانند سرعت، ولتاژ، فرکانس و غیره
- H6-07 مقدار پالس خروجی بر اساس هرتز هنگامی که کمیت مانیتور شونده 100 درصد است.



دیدگاه خود را ثبت کنید
تمایل دارید در گفتگوها شرکت کنید؟در گفتگو ها شرکت کنید.