لغزش موتور القایی و محاسبه گشتاور
لغزش موتور القایی و محاسبه گشتاور
در این مقاله مشخصه های موتور از جمله لغزش موتور القایی، نحوه محاسبه و فرمول گشتاور موتور را بررسی میکنیم. لغزش یا Slip یکی از مشخصه های اصلی موتورهای القایی آسنکرون است. عبارت آسنکرون به معنی یکسان نبودن سرعت میدان دوار با سرعت روتور می باشد. به عبارت دیگر در موتور القایی آسنکرون همواره سرعت روتور کمتر از سرعت میدان دوار خواهد بود. اختلاف سرعت روتور و میدان دوار با لغزش تعریف شده و بر اساس درصد بیان می گردد. لغزش؛ میزان عقب افتادگی سرعت روتور از میدان دوار بوده و هنگام انتخاب موتور و تنظیم تجهیزات کنترلی مانند درایو باید در نظر گرفته شود. میزان لغزش و گشتاور الکتروموتور معمولا به صورت مستقیم روی پلاک درج نمی شود. در ادامه این مقاله از سری مقالات پلاک خوانی موتور روش محاسبه لغزش را بر اساس سرعت موتور بررسی می کنیم.
لغزش موتور القایی Slip و سرعت نامی
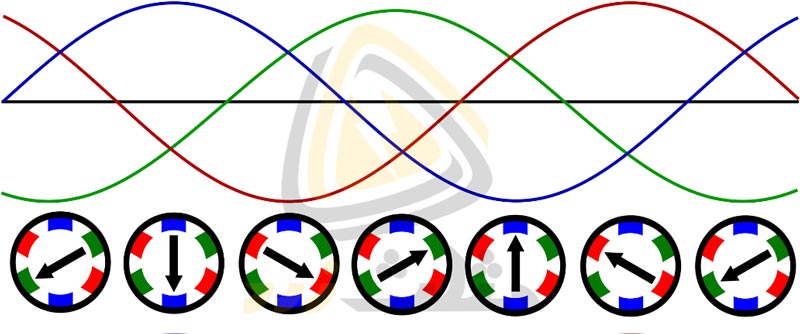
لغزش در موتورهای آسنکرون تکفاز و سه فاز وجود دارد. در این بخش نحوه ی تشکیل میدان دوار سه فاز را مرور می کنیم. در موتورهای سه فاز سه دسته سیم پیچ با اختلاف مکانی 120 درجه وجود دارد. طبق تصویر زیر؛ در صورت اتصال این سیم پیچ ها به شبکه ی سه فاز با اختلاف فاز 120 درجه، یک میدان دوار در استاتور ایجاد می شود. سرعت این میدان ثابت بوده و با سرعت سنکرون شناخته می شود.
در ویدئوی زیر که برگرفته از دوره جامع راه اندازی و حفاظت موتورهای سه فاز است، فرمول ها و نحوه محاسبه لغزش و گشتاور موتور القایی سه فاز را بررسی می کنیم:
طبق فرمول زیر؛ سرعت میدان دوار در الکتروموتورهای القایی AC با توجه به تعداد قطبها و فرکانس منبع تعیین میشود. در این فرمول n معرف سرعت میدان دوار بوده و با واحد دور در دقیقه تعریف میشود. با بررسی فرمول زیر میتوان دریافت که سرعت الکتروموتور القایی AC در شبکه 50 هرتز معادل تقسیم عدد 6000 بر تعداد قطبهای آن یا P است. این عدد در فرکانس 60 هرتز معادل 7200 خواهد بود. مقدار به دست آمده از فرمول زیر مربوط به سرعت میدان دوار بوده و با مقادیر درجشده روی پلاک الکتروموتور متفاوت است.
\[n=\frac{2\times f \times 60}{P}\]
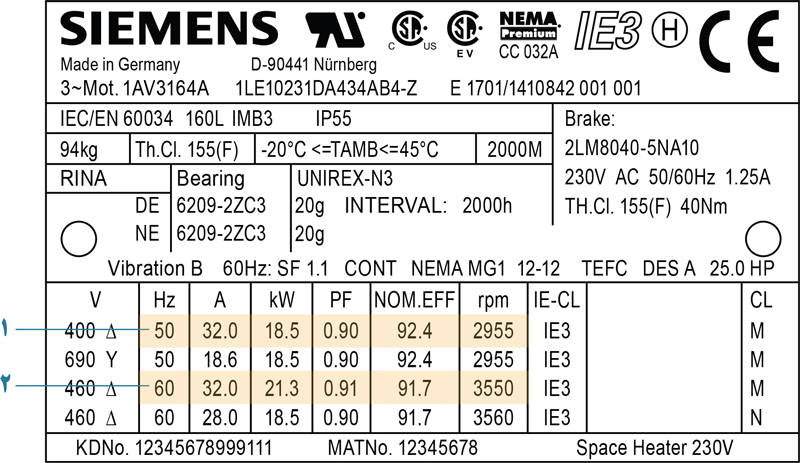
معمولا سرعت میدان دوار روی پلاک موتور درج نمی شود. در واقع سرعت ثبت شده روی موتور با احتساب میزان عقب افتادگی آن است. به عنوان مثال به ستون rpm از پلاک زیر توجه کنید. این ستون معرف دور در دقیقه یا revolutions per minute است. در بخش یک این پلاک سرعت موتور برای فرکانس 50 هرتز معادل 2955 دور در دقیقه ثبت شده است. با توجه به نزدیکی این عدد به 3000 دور می توان دریافت که موتور به شکل دو قطب سیم پیچی شده است. سرعت میدان دوار الکتروموتور دو قطب در فرکانس 50 هرتز معادل 3000 دور در دقیقه بوده که با میزان 2955 روی پلاک تفاوت دارد. این پدیده در بخش 2 نیز دیده می شود. سرعت میدان دوار موتور دو قطب در فرکانس 60 هرتز معادل 3600 دور در دقیقه خواهد بود که با 3550 دور روی پلاک متفاوت است.
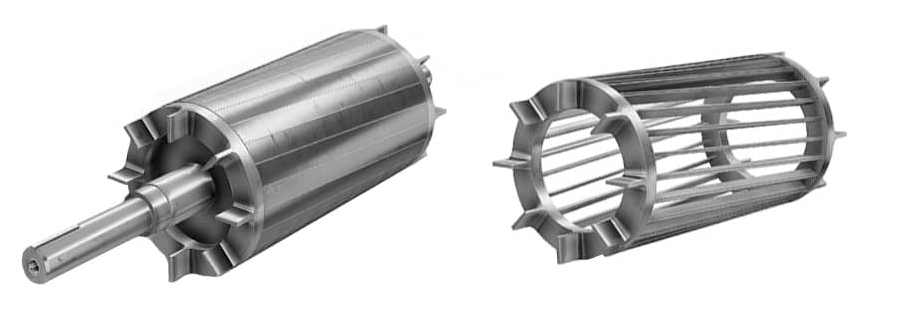
قابل ذکر است که موتور آسنکرون نیاز به لغزش داشته و بدون آن قادر به کار نیست. همانطور که می دانید اصل کار موتور قفس سنجابی بر اساس القای ولتاژ از استاتور به رتور است. در موتورهای قفس سنجابی تعدادی میله وجود داشته که ابتدا و انتهای آن ها به یکدیگر متصل شده است. القای ولتاژ در این مدار بسته باعث ایجاد جریان خواهد شد. جریان روتور یک میدان مغناطیسی تشکیل داده که با میدان مغناطیسی استاتور مخالف می کند. این اختلاف باعث چرخش موتور و تبدیل انرژی الکتریکی به مکانیکی می شود. در صورت برابر بودن سرعت میدان دوار با سرعت روتور پدیده ی القا انجام نخواهد شد. با توجه به این موضوع می توان دریافت که سرعت رتور یک ماشین آسنکرون نمی تواند با سرعت میدان دوار آن برابر باشد.
لغزش موتور القایی بهصورت عقبافتادگی سرعت واقعی الکتروموتور از سرعت دوار طبق این فرمول محاسبه میشود. در فرمول زیر S میزان لغزش موتور بر اساس درصد، \(n_{1}\) سرعت میدان دوار و n سرعت واقعی الکتروموتور است. قابل ذکر است میزان لغزش در الکتروموتورهای القایی اغلب بین 1 تا 3 درصد است و سرعت میدان دوار حاصل تقسیم عددهای 6000 در فرکانس 50 هرتز و 7200 در فرکانس 60 هرتز بر تعداد قطبها است.
\[S\%=\frac{n_{1}-n}{n_{1}}\]
جهت مطالعه ده ها مقاله ی تخصصی دیگر، بخش مقالات راه اندازی موتور سه فاز را مشاهده کنید.
جدول سرعت سنکرون
در جدول زیر سرعت سنکرون موتورهای القایی 2 تا 20 قطب را در فرکانس های 50 و 60 هرتز مشاهده می کنید. به منظور به دست آوردن لغزش موتور القایی باید نزدیک ترین سرعت موجود در این جدول به سرعت ثبت شده روی پلاک را مشخص کنیم. در ادامه با تفریق سرعت روی پلاک از سرعت میدان دوار می توان عقب افتادگی سرعت را به دست آورد. به عنوان مثال با تفریق سرعت 2955 روی پلاک از 3000 دور می توان دریافت که روتور به اندازه ی 45 دور از سرعت دوار کندتر خواهد بود. از تقسیم 45 بر 3000 و ضرب نتیجه در 100 میزان لغزش 1.5 درصد محاسبه می شود.
|
تعداد قطب |
سرعت در فرکانس 50 هرتز |
سرعت در فرکانس 60 هرتز |
|
2 |
3000 | 3600 |
|
4 |
1500 | 1800 |
|
6 |
1000 | 1200 |
|
8 |
750 | 900 |
| 10 | 600 |
720 |
| 12 | 500 |
600 |
| 16 | 375 |
450 |
| 20 | 300 |
360 |
مطالبی که در حال مطالعه ی آن هستید به صورت تصویری در دوره جامع راه اندازی و حفاظت موتور سه فاز آموزش داده شده است. در این دوره تصویری روش پلاک خوانی موتور، شناخت اصول حفاظت، شناخت تجهیزات راه اندازی و محاسبه سایز آن ها آموزش داده شده است. در بخش عملی می توانید سیم بندی راه اندازی های کنتاکتوری مانند تک ضرب، چپ گرد و راست گرد، ستاره مثلث به همراه نصب و سیم بندی 6 برند سافت استارتر زیمنس، اشنایدر، ABB، دانفوس، اوکام و سانترنو را مشاهده کنید. قسمت آخر دوره مربوط به بازدید از تاسیسات و تابلو برق های مختلف و بررسی چیدمان تجهیزات و سایز آن ها در تابلو برق است. جهت کسب اطلاعات بیشتر در خصوص این دوره می توانید صفحه آموزش جامع راه اندازی و حفاظت موتورهای سه فاز را مشاهده کنید.
گشتاور موتور القایی
گشتاور راه اندازی الکتروموتورها وابستگی زیادی به توان آنها دارد. به عنوان مثال در الکتروموتورهای کوچک با توان تا ۳۰ کیلو وات، گشتاور راه اندازی ۲٫۵ تا ۳ برابر گشتاور نامی بوده و در موتورهای متوسط با توان تا ۲۵۰ کیلو وات به ۲ تا ۲٫۵ برابر میرسد. در واقع موتورهای خیلی بزرگ گشتاور راهاندازی بسیار پائینی حتی کمتر از گشتاور نامی دارند. در نظر داشته باشید که این موتورها را نمی توان در بار کامل به صورت تک ضرب یا D.O.L راه اندازی کرد.

گشتاور نامی یک موتور را می توان با استفاده از فرمول زیر به دست آورد. در این فرمول Mr معرف گشتاور نامی بر اساس Nm و \(P_{r}\) توان نامی بر اساسKW و \(n_{r}\) سرعت نامی بر اساس دور در دقیقه یا rpm است. قابل ذکر است که معمولا مقدار گشتاور نامی و گشتاور راهاندازی روی پلاک الکتروموتور قید نشده ولی برای تنظیم سافت استارتر و درایوها ممکن است به آن نیاز داشته باشیم. با توجه به قرارگرفتن nr در مخرج کسر می توان دریافت که با افزایش سرعت، گشتاور موتور کاهش پیدا می کند. به عبارت دیگر تعداد قطب ها در تولید گشتاور مهم هستند. با کاهش تعداد قطب ها سرعت افزایش پیدا می کند ولی گشتاور موتور کمتر خواهد شد.
\[M_{r}=\frac{9550\times P_{r}}{n_{r}}\]
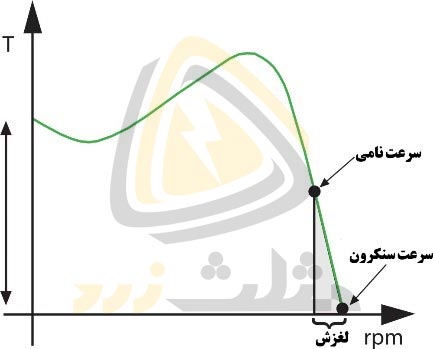
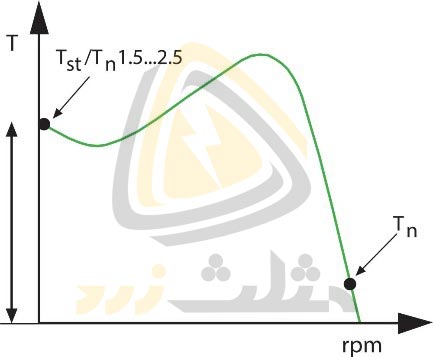
گشتاور موتور قسمت های مختلفی مانند گشتاور راه اندازی، مقدار پیک، مقدار نامی و غیره دارد. تغییرات گشتاور موتور را می توان به صورت منحنی ترسیم کرد. به عنوان مثال در تصویر زیر منحنی گشتاور یک موتور القایی قفس سنجابی معمولی را مشاهده می کنید. در این منحنی مقدار گشتاور راه اندازی یا \(T_{st}\) به صورت ضریبی بین ۱٫۵ تا ۲٫۵ برابر گشتاور نامی نمایش داده شده است. نقطهی \(T_{n}\) در انتهای این منحنی معرف گشتاور نامی موتور در سرعت نامی میباشد.
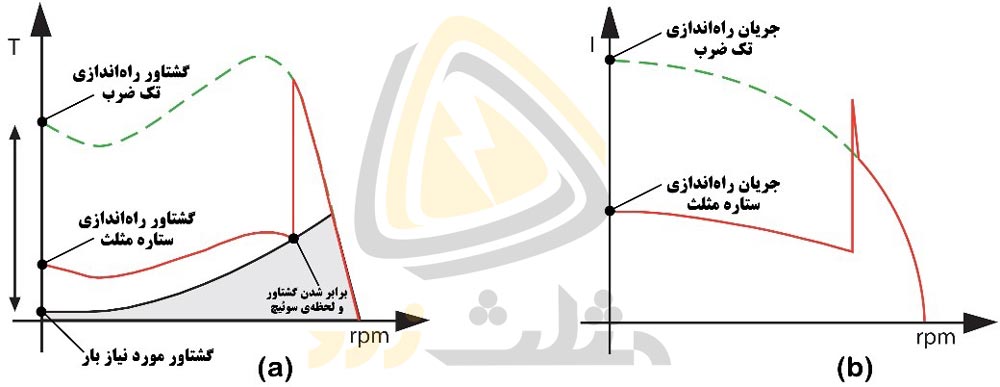
گشتاور راه اندازی موتور وابستگی زیادی به میزان ولتاژ در لحظه ی استارت دارد. با کنترل ولتاژ در لحظه ی استارت می توان گشتاور و جریان راه اندازی را کنترل کرد. این روش در راه اندازی ستاره مثلث انجام می شود. در تصویر زیر مقایسه ی منحنی های مربوط به گشتاور و جریان راه اندازی حالت تک ضرب و ستاره مثلث را مشاهده می کنید. در بخش a گشتاورهای حالت تک ضرب، ستاره مثلث و گشتاور مورد نیاز بار آورده شده است. بخش b مربوط به جریان راه اندازی بوده و روند کنترل آن را نمایش می دهد. اطلاعات بیشتر در این خصوص را می توانید با مطالعه ی مقاله ی مدار راه اندازی ستاره مثلث کسب کنید. روش های بهتری برای کنترل گشتاور و جریان راه اندازی وجود دارد که در مقاله ی راه اندازی موتور با سافت استارتر و درایو شرح داده شده است.
در این مقاله با لغزش موتور القایی و گشتاور طبق پلاک موتور آشنا شدیم و روابط و فرمول ها و نحوه ی محاسبه هر یک را شرح دادیم. دیگر مشخصه های درج شده روی پلاک موتور را در مقالاتی مانند پلاک خوانی موتورهای الکتریکی، استاندارد ابعاد و نصب الکتروموتورها، کلاس حرارتی عایق الکتروموتورها، چرخه کاری الکتروموتور و نصب و سربندی ستاره مثلث موتور سه فاز را مطالعه فرمائید. در مقالات بعدی روش های راه اندازی موتور با یکدیگر مقایسه شده و نحوه ی انتخاب تجهیزات برای هر یک شرح داده شده است.
 مثلث زرد
مثلث زرد مثلث زرد
مثلث زرد مثلث زرد
مثلث زرد مثلث زرد
مثلث زرد مثلث زرد
مثلث زرد مثلث زرد
مثلث زرد

سلام اگر امکان داره برای مقالاتتون امکان دانلود بذارید ممنون
سلام وقت بخیر. مقالات وب سایت برگرفته از کتاب های مثلث زرد هستند که دارای مجوز چاپ و نشر هستند. امکان قرار دادن دانلود برای مقالات نداریم. از طریق وب سایت و مطابق با فهرست کتاب مطالعه بفرمایید.
سلام.
اگر دو تا بار داشته باشیم ، (نمودار گشتاور -سرعت را در نظر بگیرید )یکی با نقطه کار قبل از رسیدن به گشتاور ماکزیمم و بار دیگر با نقطه ی کار بعد از گشتاور ماکزیمم .
این موتور برای کدام بار مناسب تر است ؟
فکر می کنم مورد دوم. در حالت اول ممکنه بار راه اندازی نشه. این به نحوه ی افزایش گشتاور بار، زمان راه اندازی و غیره هم داره.
با سلام و خسته نباشید و تشکر از سایت خوبتون
سوالی داشتم
اگه فرکانس موتور را با درایو به ۶۰ هرتز برسانیم تا به دور بالاتری برسیم این کار ما چه مشکلاتی بوجود خواهد آورد؟
سلام وقت بخیر. افزایش فرکانس روی هسته ی موتور تاثیر داره و ضمن تغییر در خاصیت مغناطیسی ی تونه باعث افزایش حرارت بشه.
سلام
برای ساخت یک موتور ac با توان ۶۰ وات و برق ۲۲۰ ولت با توجه به محاسبات آمپر مساوی با ۲۷. و مقاومت تقریبا مساوی با ۸۱۵ اهم می باشد. برای بدست آوردن طول سیم مورد نیاز به سطح مقطع ۱ میلیمتر مربع طول سیم بیشتر از ۴۰۰۰ متر میشه. آیا محاسبه من اشتباه هست. طول سیم مورد نیاز چقدر میشه؟
تشکر
سلام وقت بخیر. در این خصوص بهتره به جداول راهنما مراجعه کنید. اطلاعات مناسبی در این زمینه منتشر نکردیم.
درود.سواای دارم.اگرموتور ۶۹۰۰ ولت اسلیپ رینگ ۴۵۰ کیلووات توان را که روتور آن بصورت ستاره بسته شده را بصورت مثلث روتور را ببندیم، در میزان گشتاور راه اندازی و گشتاور نامی موتور چه تغییری حاصل میشود؟ با سپاس
سلام وقت بخیر. بله تغییر می کنه ولی باید چک کنید که مجاز به اینکار هستید یا خیر. حتما قبل از هر تغییری در مدار روتور، پلاک و کاتالوگ شرکت سازنده رو بررسی کنید.
باسلام و خسته نباشید
اگر ما یک موتور القایی ۳فاز متقارن داشته باشیم که یک فاز آن به هر نحوی قطع شود ، در داخل موتور میدان مستقیم چند برابر میدان معکوس خواهد شد؟
سلام وقت بخیر. این مطالب رو باید در کتاب های ماشین جستجو کنید.
با عرض سلام و خسته نباشید .عدد ۹۵۵۰ در فرمول گشتاور از کجا اومده ؟
سلام وقت بخیر. این فرمول از راهنمای زیمنس گرفته شده. برای مشخص کردن ماهیت عدد باید به کتاب های ماشین مراجعه کنید.