بلوک کنترل کننده ی PI در لوگو
کنترل کننده تناسبی-انتگرالی یا PI controller در لوگو
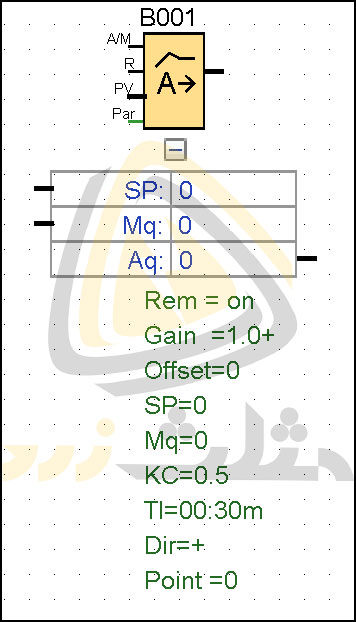
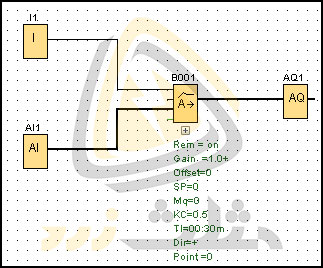
کنترل کننده ی PID یکی از کنترلر های پر کاربرد در صنعت بوده و مخفف عبارت Proportional Integral Derivative Controller است. این کنترل کننده 3 مد کنترلی از جمله تناسبی یا Proportional، کنترل انتگرالی یا Integral و کنترل مشتقی یا Derivative control دارد. مد Derivative یا همان کنترل مشتقی ممکن است موجب ناپایداری سیستم شود. برای رفع این مشکل در برخی موارد استفاده از کنترلر PI توصیه می گردد. تصویر زیر شماتیک یک بلوک کنترلر PI در نرم افزار لوگو را نشان می دهد. طبق این تصویر بلوک کنترل کننده ی PI دارای 2 پایه ورودی دیجیتال، یک ورودی آنالوگ و یک خروجی آنالوگ است.
 نقش هر یک از پایه های بلوک PI به این شرح است:
نقش هر یک از پایه های بلوک PI به این شرح است:
- ورودی A/M مشخص کنندهی حالت کنترل اتوماتیک و یا Manual است. یک بودن ورودی A/M به معنی حالت کنترل اتوماتیک و صفر بودن آن به معنی حالت کنترل دستی است.
- فعال کردن پایه ورودی Reset موجب رسیت شدن خروجی AQ میشود. تا زمانی که ورودی R فعال باشد ورودی A/M غیر فعال خواهد بود. در حالت فعال بودن ورودی ریست مقدار AQ برابر با 0 می باشد.
- ورودی PV به صورت مشکی پر رنگ نمایش داده شده و این به معنی آنالوگ بودن این پایه است. این پایه همان خروجی سنسور است که وارد کنترلر PI لوگو میشود. به عبارت دیگر سنسور، کمیت فیزیکی را اندازه گیری کرده و سیگنال الکتریکی را از طریق پایه PV به کنترلر PI منتقل میکند.
- خروجی آنالوگ این بلوک AQ نامیده می شود. مقدار رنج این خروجی در بازه 0 تا 1000 قرار دارد. در تصویر زیر جعبه پارامتر بلوک PI را مشاهده می کنید:
تصویر زیر پنجره مشخصات این بلوک را نمایش می دهد:
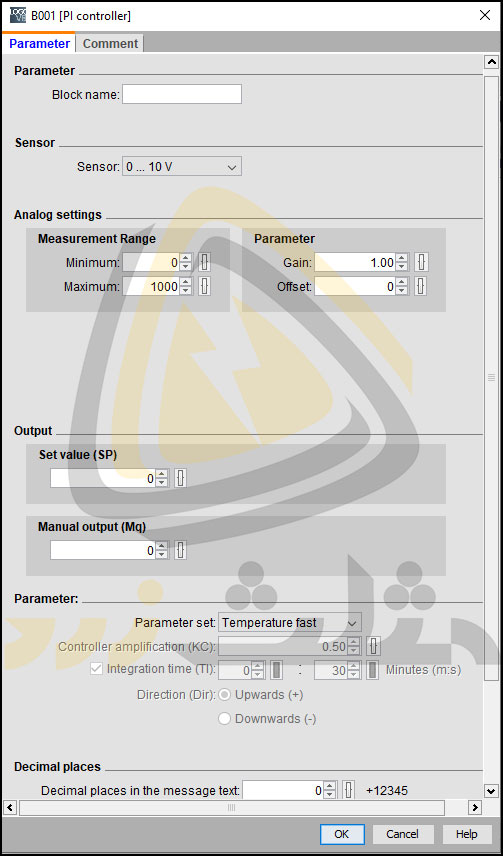
پارامتر های قابل تنظیم در این بلوک عبارت اند از:
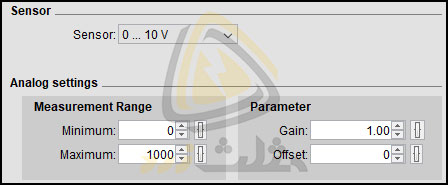
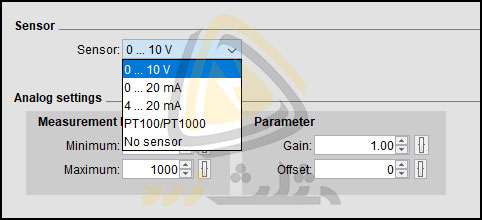
- Sensor: در این قسمت نوع سنسور مورد استفاده در ورودی PV را انتخاب میکنیم.
- Min: حداقل مقدار ورودی PV با رنج -10000 تا +20000 است.
- Max: حداکثر مقدار ورودی PV با رنج -10000 تا +20000 است.
- Gain: رنج اندازه گیری این پارامتر از -10.00 تا +10.00 است.
- Offset: رنج اندازه گیری این پارامتر از -10000 تا +10000 است.
- SP یا Set value assignment: مقداری که سنسور در صورت پایداری سیستم به بلوک PI تحویل می دهد. این پارامتر قابل تنظیم در بازه -10000 تا +20000 است. در صورت تنظیم مقدار پارامتر SP از طریق پنجره مشخصات بلوک PI؛ مقدار این پارمتر ثابت بوده و تغییر نخواهد کرد. به منظور ایجاد SP قابل تنظیم و متغییر کی توان از جعبه پارامتر بلوک PI استفاده کرد.
- Mq: مقدار خروجی AQ در حالت دستی یا Manual بلوک PI برابر با Mq است. به بیان دیگر Mq مقدار خروجی مورد نظر در حالت دستی را تعیین می کند. رنج مقادیر این پارامتر از 0 تا 1000 است. در صورت تنظیم مقدار پارامتر Mq از طریق پنجره مشخصات بلوک PI؛ مقدار این پارمتر ثابت بوده و تغییر نمی کند. به منظور تنظیم مقادیر متغیر برای Mq باید از جعبه پارامتر بلوک استفاده شود.
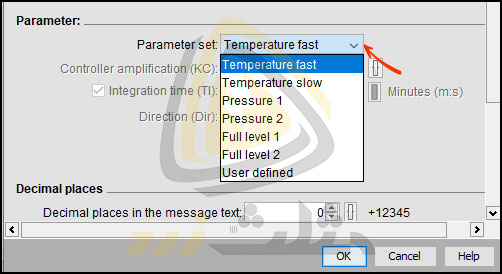
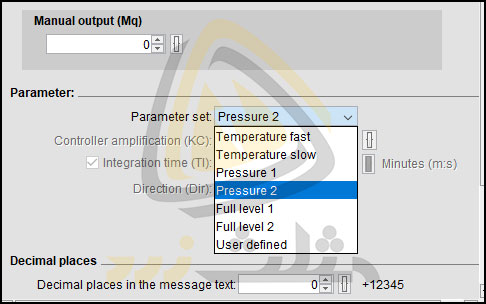
- Parameter sets: این قسمت جهت تنظیم پارامتر اندازه گیری استفاده می شود. در این بخش یک سری پارامتر برای کنترل دما، کنترل فشار و کنترل سطح وجود دارد. برای هر کدام از موارد ذکر شده دو دسته پارامتر قابل انتخاب است. به بیان دیگر جهت ساده سازی استفاده از کنترل کننده PI پارامترهای TI، KC و Dir برای کاربردهای خاص مانند دما، فشار و غیره به صورت ست های از پیش تعیین شده در دسترس کاربر قرار دارد. به عنوان مثال برای کنترل دما دو دسته پارامتر Temperature fast و Temperature slow و برای پارامتر فشار دو دسته پارامتر Pressure 1 و Pressure 2 وجود دارد. این Parameter set ها به عنوان پارامترهای متعارف کنترلی توسعه یافته اند. همانطور که اشاره شد، در این Parameter set ها مقادیر KC، TI و Dir از پیش تنظیم شده اند. در صورت انتخاب دسته پارامتر های از پیش تنظیم شده امکان تغییر پارامترهای KC، TI و Dir وجود نخواهد داشت. در صورتی که قصد انتخاب ضرایب کنترلی را داشته باشید باید گزینه Parameter Set را روی حالت User defined قرار دهیم. به عبارت دیگر جهت بهینه سازی مدار کنترل می توان گزینه ی User defined را انتخاب کرد. در تصویر زیر گزینههای قابل انتخاب در قسمت Parameter set نمایش داده شده است.
- KC: این پارامتر همان Gain در کنترلر PI لوگو بوده و در بازه ی 00.00 تا 99.99 قابل تنظیم است.
- TI: پارامتر TI همان زمان انتگرال در کنترلر PI لوگو است. رنج قابل تنظیم این پارامتر از 00.1 تا 99.59 دقیقه می باشد.
- Dir: این پارامتر مشخص کننده جهت عملکرد کنترلر بوده که میتواند + یا – باشد.
- P: تعداد رقم اعشار توسط این بخش از بین 0، 1، 2 یا 3 قابل انتخاب است.
به منظور آشنایی با کنترلر PID و ضرایب و نحوه ی عملکرد آن لطفا مقاله ی کنترل کننده ی PID چیست را مطالعه فرمایید.
در جدول زیر دسته پارامترها و مثال های کاربرد آنها به همراه ضرایب KC، TI و Dir موجود در هر یک از آن دسته ها ذکر شده است.
| دسته پارامتر | مثال های کاربردی | پارامتر KC | پارامتر TI
(s) |
پارامتر Dir |
| Temperature fast | کنترل دما، کنترل خنک کنندههای فضاهای کوچک؛ حجم کم | 0.5 | 30 | + |
| Temperature slow | گرمایش، تهویه، دما، کنترل خنک کننده فضاهای بزرگ؛ حجم زیاد | 1.0 | 120 | + |
| Pressure 1 | تغییر فشار سزیع، کنترل کمپرسور | 3.0 | 5 | + |
| Pressure 2 | تغییر فشار آهسته، کنترل فشار دیفرانسیل، کنترل کننده جریان | 1.2 | 12 | + |
| Full level 1 | Vat and/or reservoir filling without drain | 1.0 | 99.59 | + |
| Full level 2 | Vat and/or reservoir filling with drain | 0.7 | 20 | + |
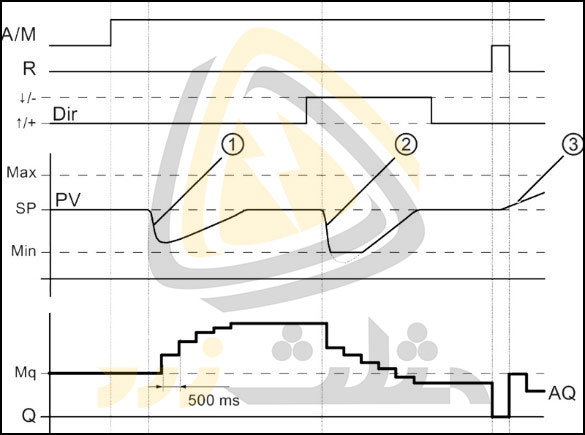
به صورت کلی ماهیت، نحوه و سرعت تغییرات AQ به پارامترهای KC و TI بستگی دارد. تصویر زیر تنها مثال خاصی از نحوه عملکرد بلوک PI است. عملکرد کنترلی به صورت مداوم و پیوسته بوده و دیاگرام زیر تنها یک بخش از این عملکرد مداوم را نمایش می دهد.
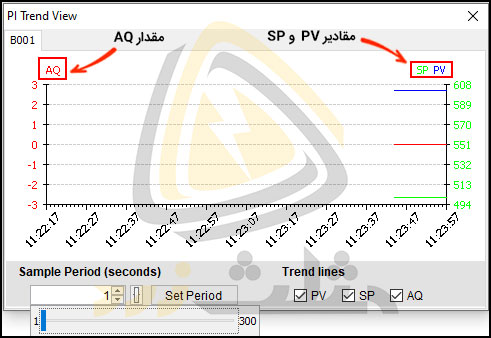
در حالت Online test یا شبیه سازی لوگوسافت، پنجره ایی تحت عنوان Trend view جهت نمایش روند کلی تغییرات PV، SP و AQ در کنترلر PI نمایش داده می شود. دوره ی زمانی نمونه برداری برای نمایش تغییرات این پارامتر ها در پنجره Trend view قابل تنظیم است. این تنظیمات از طریق گزینه Set Period در پنجره PI Trend View انجام می شود. واحد زمان نمونه برداری بر حسب ثانیه بوده و می تواند از 1 تا 300 تنظیم گردد.
عملکرد کلی این بلوک به شرح زیر است:
- ابتدا بسته به وضعیت ورودی A/M حالت کاری کنترلر را مشخص میکنیم. اگر ورودی A/M برابر با صفر باشد آنگاه مقدار خروجی AQ برابر با مقدار تنظیم شده در پارامتر Mq میشود. اگر ورودی A/M برابر با 1 باشد آنگاه حالت کنترل اتوماتیک اجرا می شود.
- مقدار PV در بلوک PI از رابطه زیر محاسبه میشود:
\[PV = \left( {PV*gain} \right) + Offset\] - در صورتی که مقدر PV به دست آمده از فرمول بالا با مقدار SP برابر باشد، مقدار خروجی AQ تغییری نخواهد کرد. در صورت عدم برابر بودن PV و SV؛ عملکرد تابع PI بر اساس پارامتر Dir تعیین می شود. در این حالت یکی از دو گزینه ی زیر اجرا خواهد شد:
-
- حالت اول) انتخاب (+) Dir = upwards :
- اگر مقدار بروز شدهی PV بزرگتر از SP باشد آنگاه کنترلر PI مقدار AQ را کاهش میدهد.
- اگر مقدار بروز شدهی PV کوچکتر از SP باشد آنگاه کنترلر PI مقدار AQ را افزایش میدهد.
- حالت دوم) انتخاب (-) Dir = downwards :
- اگر مقدار بروز شدهی PV بزرگتر از SP باشد آنگاه کنترلر PI مقدار AQ را افزایش میدهد.
- اگر مقدار بروز شدهی PV کوچکتر از SP باشد آنگاه کنترلر PI مقدار AQ را کاهش میدهد.
- حالت اول) انتخاب (+) Dir = upwards :
-
- روند تغییر خروجی AQ تا برابر شدن مقدار جدید PV با SP ادامه می یابد. سرعت تغییر مقدار AQ به پارامترهای KC و TI بستگی دارد. در نظر داشته باشید که اگر مقدار ورودی PV از مقدار تنظیم شده در پارامتر Max تجاوز کند، آنگاه مقدار بروز رسانی شدهی پارامتر PV برابر با مقدار Max خواهد شد. از طرفی اگر مقدار پارامتر PV کمتر از مقدار تنظیم شده در پارامتر Min شود آنگاه مقدار به روز رسانی شدهی پارامتر PV برابر با مقدار Min خواهد شد. قابل ذکر است که زمان نمونه برداری این بلوک برابر با 500 میلی ثانیه است.
- با فعال شدن ورودی R، خروجی آنالوگ AQ ریست میشود. با فعال بودن ورودی R، ورودی A/M نیز غیر فعال خواهد بود.
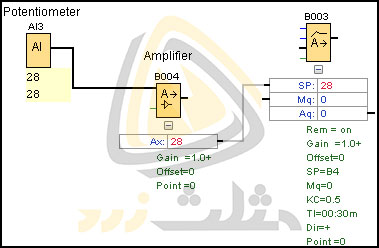
به منظور داشتن ست پوینت قابل تغییر می توان از یک پتانسیومتر استفاده کرد. فرض کنید یک پتانسیومتر 0 تا 10 ولت وجود داشته و قصد تنظیم مقدار SP را با آن داریم. در این حالت باید از یک ورودی آنالوگ به عنوان پتانسیومتر در برنامه استفاده شود. اما سوال این است که این ورودی 0 تا ولت را چگونه به جعبه پارامتر بلوک PI متصل کنیم؟
از آن جا که امکان اتصال مستقیم مقدار AI به مقدار یک پارامتر در جعبه پارامتر وجود ندارد، باید از یک بلوک Amplifier استفاده کنیم. طبق تصویر می توان خروجی AI یا همان پتانسیومتر را به ورودی Analog amplifier متصل کرد. در این حالت با تغییر پتانسیومتر مقدار SP در بلوک PI نیز تغییر میکند. در این نقشه مقدار SP به صورت متغییر و قابل تنظیم خواهد بود.
در تصویر زیر تنظیمات داخلی بلوک تقویت کننده آنالوگ را مشاهده می کنید. به دلیل استفاده از پتانسیومتر 0 تا 10 ولت در این مثال باید در قسمت Sensor گزینه ی 0 تا 10 ولت انتخاب شود.
به منظور درک بهتر از نحوه ی استفاده از بلوک PI لوگو به این مثال توجه کنید. فرض کنید در یک پروژه باید خروجی پمپ آب از طریق تنظیم سرعت پمپ انجام می شود. با اتصال ورودی I1 به A/M می توان یکی از دو حالت کنترل اتوماتیک و دستی را انتخاب کرد. در ادامه می توان ورودی آنالوگ AI1 را به پایه PV متصل کرد. در این مثال سنسور فشار با خروجی 0 تا 10 ولت است. همانطور که مشاهده می کنید در تنظیمات سنسور بلوک PI گزینه 0 تا 10 ولت انتخاب شده است.
خروجی بلوک AQ1 یک سیگنال آنالوگ جهت تنظیم سرعت موتور بوده که می توان آن را به درایو متصل کرد.
فرض کنید هدف ما در این پروژه تنظیم فشار روی 500 واحد باشد. به این منظور مقدار 500 را برای SP انتخاب می کنیم. پارامتر SP یا Setpoint Value مقداری است که سنسور باید به منظور پایداری سیستم به بلوک PI تحویل دهد. به دلیل اسکیل شدن بازه 0 تا 10 ولت روی 0 تا 1000، تنظیم پارامتر SP روی 500 معادل با دریافت 5 ولت از سنسور خواهد بود.
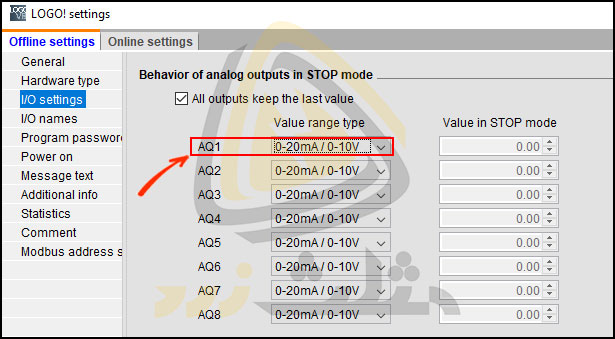
پارامتر Manual Output یا Mq مقدار خروجی مورد نظر در حالت دستی را مشخص میکند. در این مثال مقدار Mq را روی 100 تنظیم می کنیم. این مقدار 10 درصد از حداکثر سرعت یعنی ده درصد 1000 بوده و معادل با یک ولت است. در نظر داشته باشید که در تنظیمات بلوک AQ1 نوع خروجی AQ را روی حالت 0 تا 10 قرار داده شده است. به منظور بررسی بیشتر تنظیمات AQ ها و دسترسی به پنجره ی زیر لطفا مقاله ی برنامه نویسی آنالوگ لوگو را مطالعه کنید.
در قسمت Parameter باید کاربرد یا Application را انتخاب کنیم. در این بخش یک سری پارامتر برای کنترل دما، کنترل فشار و کنترل سطح وجود دارد. همانطور که مشاهده می کنید برای هر کدام از موارد دو دسته پارامتر وجود دارد. این دسته ها به عنوان پارامترهای متعارف کنترلی توسعه داده شده اند. با توجه به هدف این پروژه می توان در قسمت Parameter Set گزینه Pressure 2 را انتخاب کرد.
به منظور تنظیم ضرایب کنترلی باید گزینه Parameter Set را روی حالت User defined قرار داد. به بیان دیگر جهت بهینه سازی مدار کنترل می توان از گزینه ی User Defined Parameter در قسمت Parameter set استفاده کرد. مقادیر در این مثال به صورت پیشفرض هستند. پنجره PI Trend View پس از شروع شبیه سازی باز خواهد شد. در این قسمت تغییرات AQ، PV و SP قابل مشاهده هستند. در صورت صفر بودن ورودی I1 حالت دستی فعال شده و مقدار 1 ولت در Mq به خروجی منتقل می شود. به عبارت دیگر در این حالت مقدار خروجی AQ برابر با 1 ولت خواهد بود.
مطالب شرح دادهشده در این مقاله را میتوانید بهصورت ویدئو در دوره تصویری لوگو زیمنس مشاهده کنید. در این دورهی آموزشی با انواع پی ال سی، زبانهای برنامهنویسی و مینی پی ال سی لوگو زیمنس آشنا میشویم. آموزش لوگو از ابتدا صورت گرفته و شامل بررسی ماژول اصلی، کارتهای توسعه، نصب، سیم بندی، برنامهنویسی و کنترل توسط اپلیکیشن و وب سرور میشود. در بخش برنامهنویسی تمام بلوکهای دیجیتال، شبکه، آنالوگ و غیره بررسیشده و نحوهی کار آنها روی لوگو نمایش دادهشده است. مانیتورینگ و کنترل لوگو از طریق اپلیکیشن، وب سرور و صفحههای طراحیشده توسط LWE صورت میگیرد. این موارد نیز در دورهی تصویری شرح دادهشدهاند. لطفاً جهت مشاهدهی سرفصلها و لیست ویدئوهای این دوره روی عبارت لوگو زیمنس کلیک کنید.
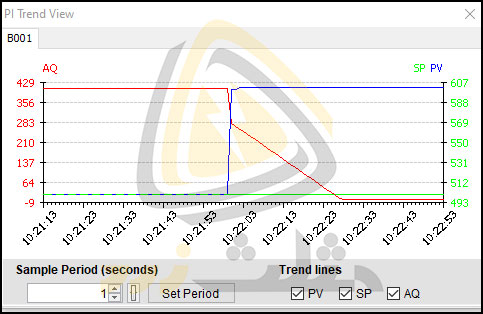
در ابتدا مقدار فشار یا PV برابر با صفر بوده و از فشار تنظیم شده در SP کم تر است. در این حالت مقدار AQ تا 10 ولت یا 1000 واحد افزایش پیدا می کند. تا زمانی که مقدار ورودی PV از SP کمتر باشد؛ مقدار خروجی به صورت پیوسته افزایش پیدا می کند. علت این امر عدم نزدیک شدن فشار سیستم به مقدار تنظیم شده در SP است. با عبور SP از مقدار 500؛ ولتاژ خروجی متناسب با اختلاف SP و PV کاهش پیدا می کند. در این حالت پمپ با سرعت کمتری کار می کند چون فشار به خودی خود بالا است. سیگنال خروجی AQ تا زمان تنظیم دقیق مقدار فشار اندازه گیری شده روی 500 یا همان SP؛ پایدار نخواهد شد.
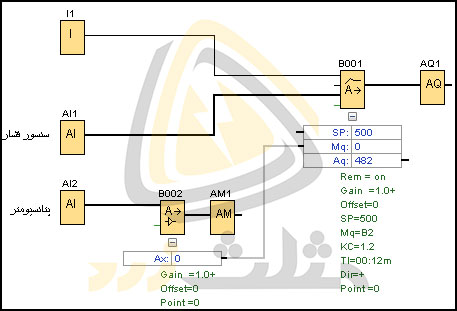
به منظور تنظیم مقدار سرعت پمپ در حالت دستی یا Manual می توان از یک پتانسیومتر استفاده کرد. در تصویر زیر ورودی AI2 به عنوان پتانسیومتر در نظر گرفته شده است. برای پیاده سازی این مدار باید پتانسیومتر با خروجی 0 تا ولت به ورودی AI2 لوگو زیمنس متصل شود. با استفاده از یک بلوک تقویت کننده آنالوگ می توان مقدار خروجی آنالوگ 0 تا 1000 واحد پتانسیومتر را به پارامتر Mq منتقل کرد. به این ترتیب امکان کنترل واقعی سیستم در حالت دستی وجود دارد. تصویر زیر نحوه ی برنامه نویسی این مثال را نمایش می دهد.
در تصویر زیر پنجره ی Trend view در حالت اتوماتیک با مقدار ورودی PV برابر با 0 آورده شده است.
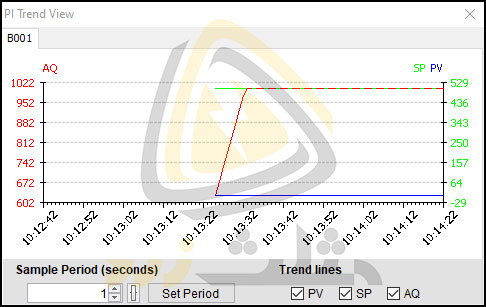
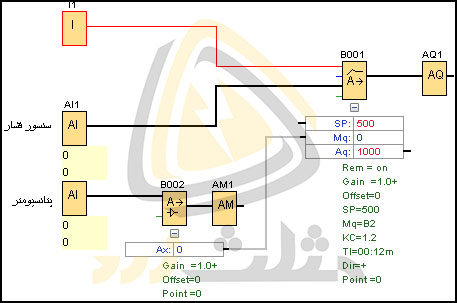
در تصویر زیر وضعیت مدار را مشاهده می کنید:
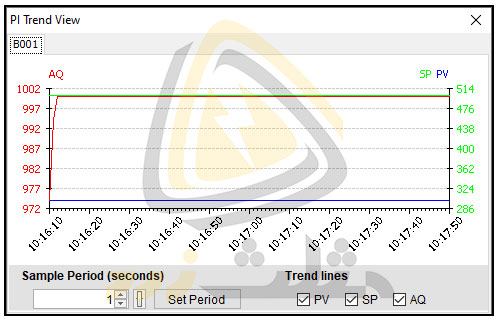
Trend view در حالت اتوماتیک و هنگامی که مقدار ورودی PV برابر با 300 است را مشاهده می کنید:
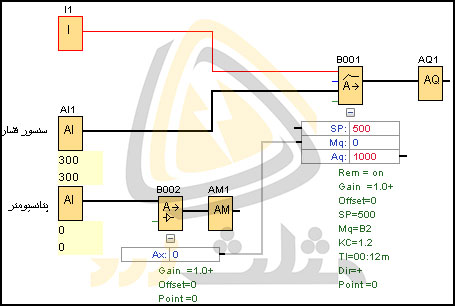
وضعیت مدار در این حالت به شکل زیر است:
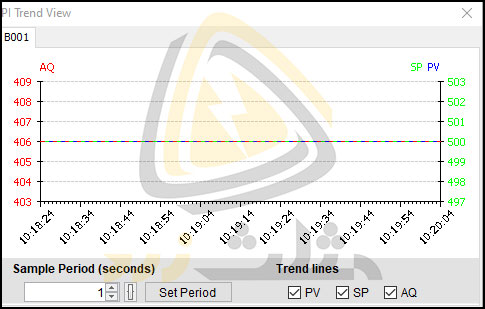
تصویر زیر پنجره ی Trend view در حالت اتوماتیک و هنگامی که مقدار ورودی PV برابر با 500 است را نشان می دهد. همانطور که مشاهده می کنید در نقطه ی یکسان شدن مقدار SP و PV با یکدیگر، مقدار AQ ثابت می شود. این مقدار برابر با 406 است.
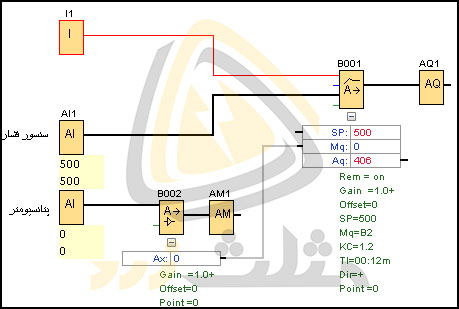
تصویر زیر وضعیت بلوک های استفاده شده در برنامه را در این حالت نمایش می دهد.
پنجره ی Trend view در حالت اتوماتیک با مقدار ورودی PV برابر با 602 را مشاهده می کنید:
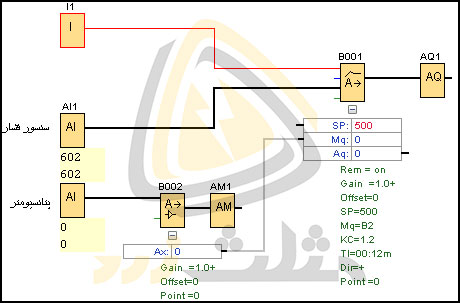
تصویر زیر وضعیت بلوک های مدار را در این حالت نمایش می دهد.
 مثلث زرد
مثلث زرد مثلث زرد
مثلث زرد مثلث زرد
مثلث زرد مثلث زرد
مثلث زرد مثلث زرد
مثلث زرد مثلث زرد
مثلث زرد مثلث زرد
مثلث زرد مثلث زرد
مثلث زرد
دیدگاه خود را ثبت کنید
تمایل دارید در گفتگوها شرکت کنید؟در گفتگو ها شرکت کنید.