تنظیم پارامترهای سافت استارتر دیجیتال
تنظیم پارامترهای سافت استارتر دیجیتال
در این مقاله به تنظیم پارامترهای سافت استارتر دیجیتال می پردازیم. قبل از انتخاب نحوه راهاندازی سافت استارتر باید روش استفاده و تعداد الکتروموتورهای متصل شده به آن را مشخص کنیم.
همانگونه که در بخشهای قبلی شرح داده شد، برخی از سافتاستارترهای دیجیتال میتوانند چند گروه پارامتر برای کار در تأسیسات مختلف داشته باشند. به عبارت سادهتر شما میتوانید یک یا چند الکتروموتور را با روش و زمانهای مختلف راهاندازی کنید.
- تنظیم پارامترهای سافت استارتر دیجیتال
- روش های تنظیم پارامتر
- 1.افزایش ولتاژ یا Voltage Ramp
- 2.افزایش ولتاژ و محدودیت جریان
- 3.ضربهی اولیه یا Breakaway یا Kick-Start
- 4.تنظیم پارامتر کنترل گشتاور یا Torque Control
- 5.کنترل گشتاور و محدودیت جریان
- 6.حالت تکضرب یا Direct On Line
- 7.تنظیم پارامتر گرم کردن موتور یا Motor Heating
- 8.جریان ثابت یا Constant Current
- 9.جریان افزایشی یا Current Ramp
- 10.راهاندازی متناسب با شرایط موتور یا Adaptive Control
- 11.سرعت پائین یا Jog
روش های تنظیم پارامتر
تنظیم پارامترهای سافتاستارتر دیجیتال میتواند طبق ویزاردهای از پیش تعیینشده و یا بهصورت مستقیم انجام شود. توصیه میشود با توجه به قابلیتهای موردنیاز، یکی از منوهای راهاندازی سریع، استاندارد یا پیشرفته را انتخاب کرده و گامبهگام اطلاعات آن را کامل کنید. اولین بخش هر یک از منوهای فوق مربوط به نوع تأسیسات و مشخصات الکتروموتور بوده و باید نقش و مقادیر جریان نرمال، جریان رتور قفلشده، گشتاور، سرعت و غیره را در آنها وارد کنیم.
درصورتیکه نقش الکتروموتور یا نام تأسیسات را از فهرست مشخصشده انتخاب کنید، بهترین روش راهاندازی و توقف با زمانهای از پیش تعیینشده در پارامترها ثبت خواهد شد. بهعنوانمثال در ویزارد راهاندازی سریع سافتاستارتر سری 44 زیمنس پس از انتخاب زبان میتوانید لیست تأسیسات را مشاهده میکنید. در این لیست عبارتهای پمپ، فن، کمپرسور و غیره وجود داشته که میتوانید یکی از آنها را انتخاب کنید. پس از انتخاب نقش الکتروموتور کافی است جریان نامی، زمان راهاندازی و محدودیت جریان را تنظیم کرده و اطلاعات را ذخیره کنید. با این کار ویزارد راهاندازی سریع به پایان رسیده و سافتاستارتر آمادهی کار خواهد بود.
در ویدئوی زیر که برگرفته از دوره جامع راه اندازی و حفاظت موتورهای سه فاز است منو و پارامترهای سافت استارتر سانترنو را بررسی کرده ایم:
در تنظیم پارامترهای سافت استارتر به صورت تخصصی میتوانید وارد منوی روشهای راهاندازی یا Starting Mode شده و یکی از گزینههای موجود را انتخاب کنید. با توجه به نوع و برند سافتاستارت ممکن است در این بخش آیتمهای متنوعی وجود داشته باشد. قابلذکر است که در برخی برندها حالت خودکار برای تنظیم پارامترها و برداشت اطلاعات وجود دارد. با فعال کردن حالت خودکار و تنظیم جریان نامی الکتروموتور، اطلاعات دیگر بهصورت خودکار برداشت و ثبت خواهد شد. این روند در چند راهاندازی اول انجامشده و بهمرور اطلاعات کامل میشود. برای آشنایی با روشهای مختلف راهاندازی، در ادامه گزینههای موجود در چند برند سافتاستارت شرح دادهشده است.
1.افزایش ولتاژ یا Voltage Ramp
در تنظیم پارامترهای سافت استارتر دیجیتال اولین و سادهترین حالت راه اندازی، روش افزایش ولتاژ یا ولتاژ رمپ است. این نمونه دقیقاً شبیه به افزایش ولتاژ در سافتاستارترهای آنالوگ بوده و میتواند باقابلیتهای دیگر مانند محدودیت جریان یا ضربهی اولیه ترکیب شود.
با انتخاب روش ولتاژ رمپ باید میزان ولتاژ اولیه و زمان راهاندازی را نیز مشخص کنیم. قابلذکر است که طبق تصویرهای زیر، میزان ولتاژ اولیه و زمان راهاندازی مشخصکنندهی گشتاور استارت، میزان شتاب و جریان الکتروموتور هستند. در این تصویر 4-20 منحنی (a) مشخصکنندهی زمان راهاندازی سریع و طولانی بوده و منحنی (b) تغییر گشتاورها را نمایش میدهد.
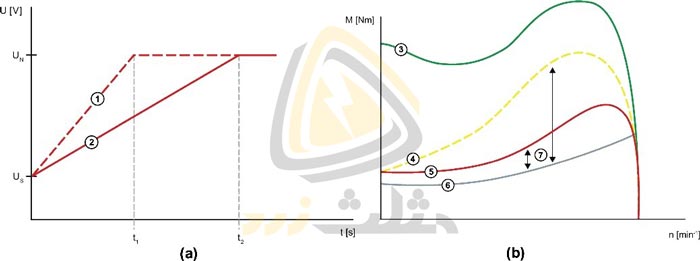
در زیر مشاهده میکنید که هرچقدر ولتاژ اولیه بیشتر و زمان راهاندازی کوتاهتر باشد، الکتروموتور جریان بیشتری دریافت خواهد کرد.
2.افزایش ولتاژ و محدودیت جریان
با تنظیم پارامترهای سافت استارتر برای کنترل جریان راهاندازی در یک بازهی خاص، میتوان از قابلیت محدودیت جریان به همراه ولتاژ رمپ استفاده کرد. این روش همانند سافتاستارترهای آنالوگ بوده و جریان را در خلال راهاندازی بهصورت ثابت نگه میدارد.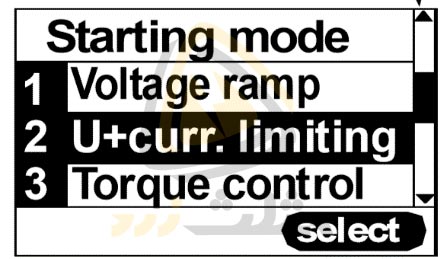
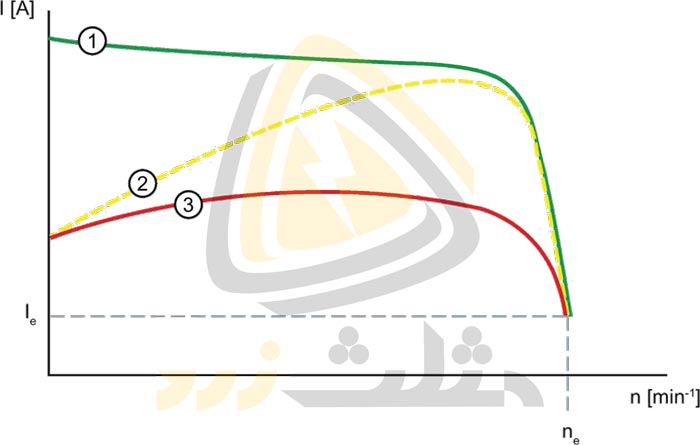
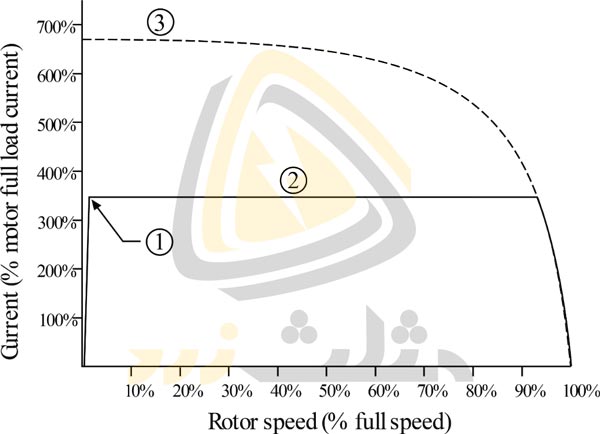
در سافتاستارترهای دیجیتال میتوان ضربهی اولیه را نیز با این مد ترکیب کرده و بارهای سنگین را راهاندازی کرد. در تصویر زیر منحنی تغییرات جریان در روند راهاندازی ولتاژ رمپ به همراه محدودیت جریان نمایش دادهشده است. منحنی 1 مربوط به جریان راهاندازی تکضرب و منحنی 2 مربوط به محدودیت جریان باقابلیت تنظیم است.
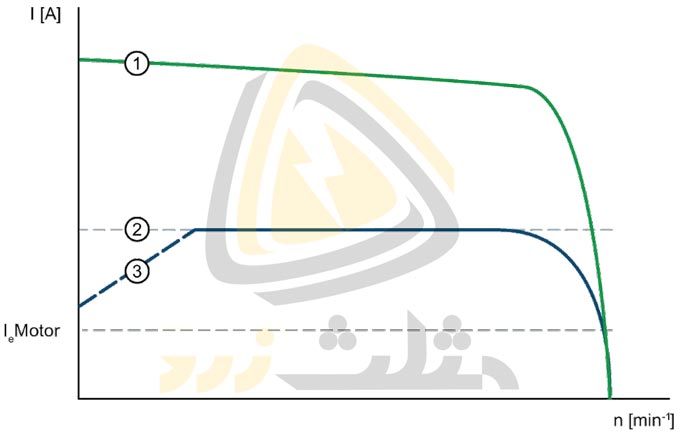
در این روش سافتاستارتر راهاندازی را از ولتاژ تنظیمشده شروع کرده و کنترل را بر مبنای میزان جریان ادامه میدهد. در صورت رسیدن جریان به حد تنظیمشده، فانکشن محدودیت جریان فعالشده و کنترل را همانند سافتاستارترهای آنالوگ ادامه میدهد.
3.ضربهی اولیه یا Breakaway یا Kick-Start
در تنظیم پارامترهای سافت استارتر روش ایجاد ضربه اولیه میتواند با حالتهای رمپ ولتاژ، محدودیت جریان و کنترل گشتاور ترکیب شود. پالس یا ضربهی اولیه دارای دو پارامتر قابل تنظیم ولتاژ و زمان است. میزان ولتاژ تعیینکنندهی بزرگی گشتاور ضربه بوده و میتواند تا 100 درصد ولتاژ نامی افزایش داده شود. این افزایش ولتاژ به معنی توانایی ایجاد گشتاور راهاندازی تکضرب برای مدت قابل تنظیم در ابتدای استارت است. میزان ولتاژ باید به نحوی تنظیم شود که بار متصل شده به الکتروموتور بلافاصله راهاندازی شده و شتاب بگیرد.
پارامتر زمان تعیینکنندهی این است که ولتاژ تنظیمشده چقدر به موتور اعمال شود. با پایان این زمان روند استارت به حالت عادی برگشته و راهاندازی نرم طبق تنظیمات صورت میگیرد. در نظر داشته باشید که این زمان اغلب با واحد میلیثانیه مشخصشده و تنظیم آن روی صفر باعث غیرفعال شدن ضربهی اولیه خواهد شد.
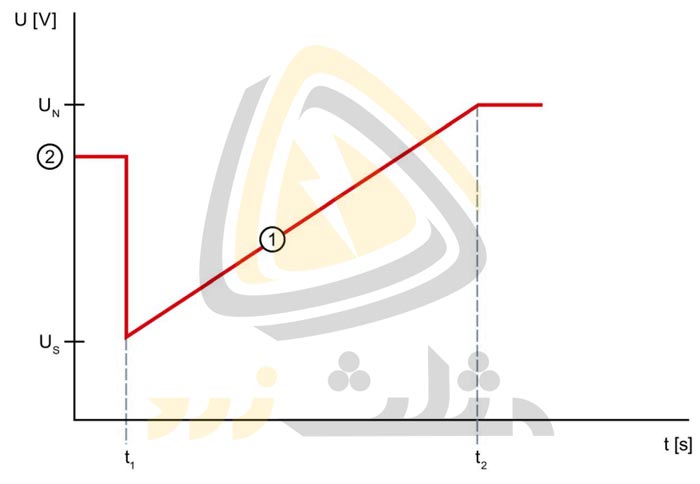
در تصویر زیر ترکیب ضربهی اولیه با حالت راهاندازی ولتاژ رمپ را مشاهده میکنید. در این روش ابتدا ولتاژ شمارهی 2 به الکتروموتور اعمالشده و پس از پایان زمان t1 به مقدار تنظیمشدهی Us کاهش داده و راهاندازی ادامه داده میشود.
همانگونه که شرح داده شد ضربهی اولیه برای بارهای بسیار سنگین با رفتار گشتاور معکوس مناسب بوده و نباید بدون علت استفاده شود. به عبارت سادهتر تنها این فانکشن را زمانی فعال کنید که واقعاً بار به آن نیاز دارد. فعال کردن ضربهی اولیه در بارهای کوچک باعث ایجاد صدمات مکانیکی یا راهاندازی ناقص خواهد شد. بهعنوانمثال فعال کردن اشتباه این حالت در پمپها باعث ظاهر شدن خطای وضعیت راهاندازی اشتباه میشود.
درصورتیکه زمان و ولتاژ پالس اولیه بیشازحد باشد، الکتروموتور شبیه به حالت تکضرب راهاندازی شده و ممکن است سافتاستارتر در حالت خطای اضافهبار قرار بگیرد. برای رفع این مشکل باید ولتاژ اولیه کاهش و یا زمان راهاندازی افزایش داده شود.
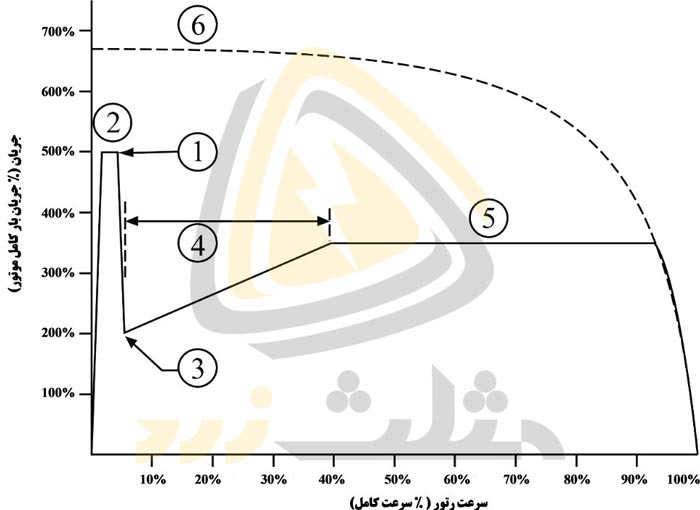
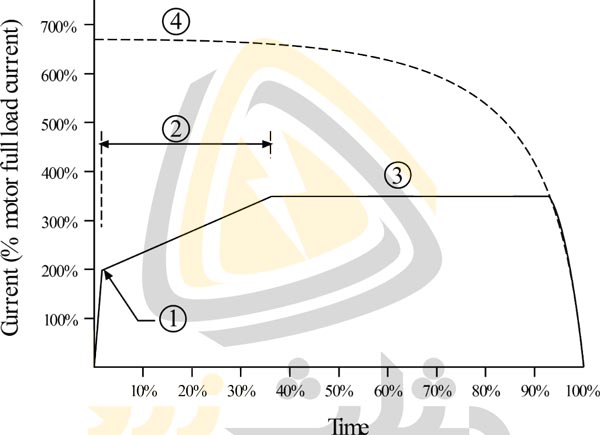
در تصویر زیر ترکیب ضربهی اولیه با فانکشن محدودیت جریان راه مشاهده میکنید. در این تصویر محور عمودی مربوط به جریان و محور افقی مربوط بهسرعت الکتروموتور است. در لحظهی اول جریان تا 500 درصد بالا رفته و بعد از سپری شدن زمان تنظیمی به مقدار 200 درصد کاهش داده میشود. افزایش جریان از 200 درصد تا محدودیت جریان که در این مثال 350 درصد است طبق زمان راهاندازی انجام خواهد شد.
4.تنظیم پارامتر کنترل گشتاور یا Torque Control
سافتاستارترهای دیجیتال میتوانند گشتاور و سرعت الکتروموتور را از طریق اندازهگیری rms ولتاژ و جریان و زاویهی بین آنها محاسبه کنند. این حالت به مد بدون سنسور معروف بوده و ولتاژ اعمالشده به موتور بر اساس نتیجهی محاسبات کنترل خواهد شد.
کنترل گشتاور به معنی کنترل خطی نیروی تولیدی از مقدار تنظیمشده تا مقدار نامی است. مزیت این حالت نسبت به کنترل ولتاژ، تقویت رفتار مکانیکی در راهاندازی بوده و برای دستیابی به بهترین نتیجه باید اطلاعات موتور را بهصورت کامل در سافتاستارتر وارد کنیم. در نظر داشته باشید که گشتاور بالا به معنی جریان راهاندازی سنگین و گشتاور پائین به معنی جریان کمتر است.
برای راهاندازی با مد کنترل گشتاور، باید این گزینه را از لیست روشهای راهاندازی انتخاب کرده و مقادیر گشتاور راهاندازی و محدودکننده را تنظیم کنید. مقادیر محدودکننده به این معنی هستند که در خلال راهاندازی میزان گشتاور باید در چه بازهای قرار داشته باشد.
محدودیت گشتاور بیشترین میزان مجاز نیروی تولیدشده توسط الکتروموتور در راهاندازی را مشخص میکند. میزان تنظیمشده برای محدودیت گشتاور باید حدود 150 درصد باشد تا الکتروموتور بهخوبی راهاندازی شود. اگر مقدار تنظیمشده بیشازحد کم باشد ممکن است سافتاستارتر هنگام راهاندازی در حالت خطا قرار بگیرد.
مطالبی که در حال مطالعه ی آن هستید به صورت تصویری در دوره جامع راه اندازی و حفاظت موتور سه فاز آموزش داده شده است. در این دوره تصویری روش پلاک خوانی موتور، شناخت اصول حفاظت، شناخت تجهیزات راه اندازی و محاسبه سایز آن ها آموزش داده شده است. در بخش عملی می توانید سیم بندی راه اندازی های کنتاکتوری مانند تک ضرب، چپ گرد و راست گرد، ستاره مثلث به همراه نصب و سیم بندی 6 برند سافت استارتر زیمنس، اشنایدر، ABB، دانفوس، اوکام و سانترنو را مشاهده کنید. قسمت آخر دوره مربوط به بازدید از تاسیسات و تابلو برق های مختلف و بررسی چیدمان تجهیزات و سایز آن ها در تابلو برق است. جهت کسب اطلاعات بیشتر در خصوص این دوره می توانید صفحه آموزش جامع راه اندازی و حفاظت موتورهای سه فاز را مشاهده کنید.
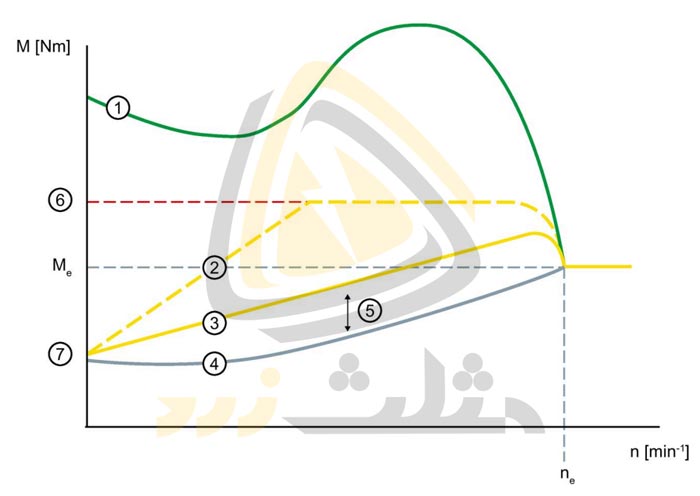
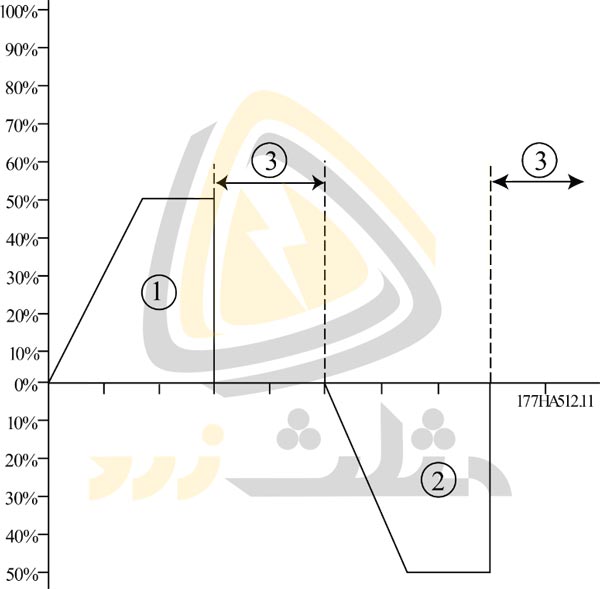
مد کنترل گشتاور برای تمامی تأسیسات مخصوصاً مواردی که نیاز به راهاندازی نرم دارند قابلاستفاده است. در تصویر زیر منحنی گشتاور با توجه به زمان و محدودیت تنظیمشده را مشاهده میکنید. در این منحنی t1 زمان قابل تنظیم راهاندازی، t2 زمان رسیدن به گشتاور نامی و t3 زمان نهایی راهاندازی است.
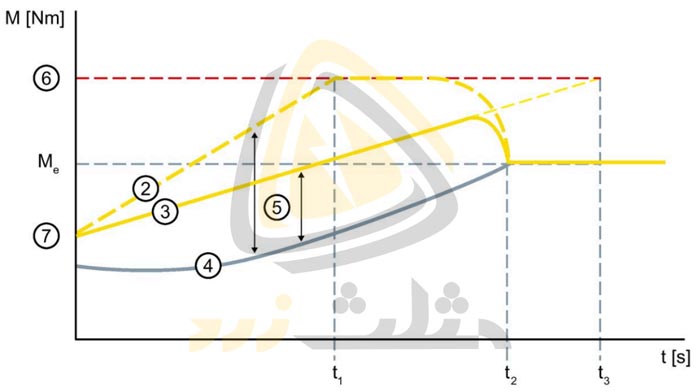
در اغلب سافتاستارترها قابلیتی برای تشخیص راهاندازی سریع وجود دارد. بهعنوانمثال اگر الکتروموتور قبل از پایان زمان راهاندازی به نقطهی t2 برسد، ولتاژ کامل شده و بایپس بسته خواهد شد. حالت راهاندازی گشتاور نرم نیز میتواند با مدهای دیگر مانند پالس اولیه و محدودیت جریان ترکیب شود. پالس یا ضربهی اولیه در ماشینآلاتی استفاده میشود که دارای پاسخ معکوس بار بوده و به یک گشتاور بالا در لحظهی استارت نیاز دارند. ترکیب حالت گشتاور نرم با محدودیت جریان نیز یک گزینهی مناسب برای راهاندازیهای بسیار سنگین است.
5.کنترل گشتاور و محدودیت جریان
مدل دیگری که میتوان برای راهاندازی استفاده کرد ترکیب حالتهای کنترل گشتاور به همراه محدودیت جریان است.
این ترکیب یک گشتاور خطی با جریان کنترلشده ایجاد کرده و برای راهاندازی تمام تأسیسات مفید است. در این روش نیز میتوان از ضربهی اولیه برای راهاندازی بارهای سنگین استفاده کرد. با انتخاب این گزینه از لیست حالتهای راهاندازی باید مقادیر گشتاور اولیه، محدودیت گشتاور، زمان راهاندازی، میزان محدودیت جریان و در صورت نیاز ولتاژ و زمان پالس اولیه را تنظیم کنید. با تنظیم صحیح این مقادیر منحنی زیر هنگام راهاندازی ایجاد خواهد شد.
درصورتیکه از ضربهی اولیه استفاده کنید، با دریافت فرمان راهاندازی ابتدا یک گشتاور سنگین ایجادشده و بعد از گذشت زمان تنظیمی به مقدار گشتاور اولیه بازمیگردد. در ادامه افزایش گشتاور از مقدار اولیه تا گشتاور نامی بهصورت خطی و با زمان تنظیمشده در Starting Time انجام خواهد شد.
6.حالت تکضرب یا Direct On Line
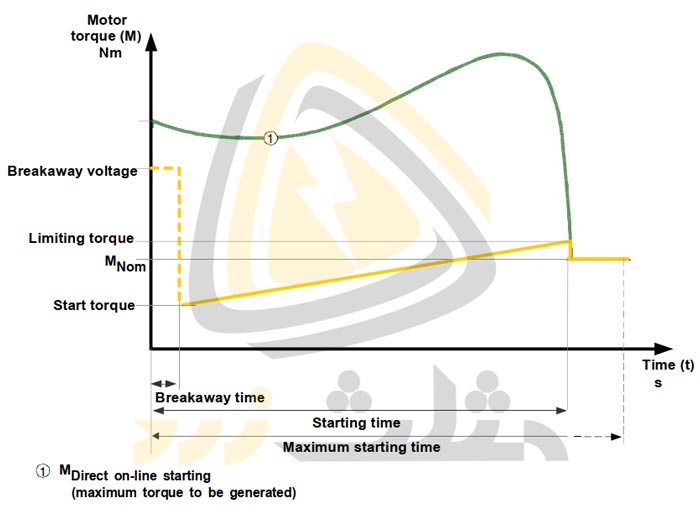
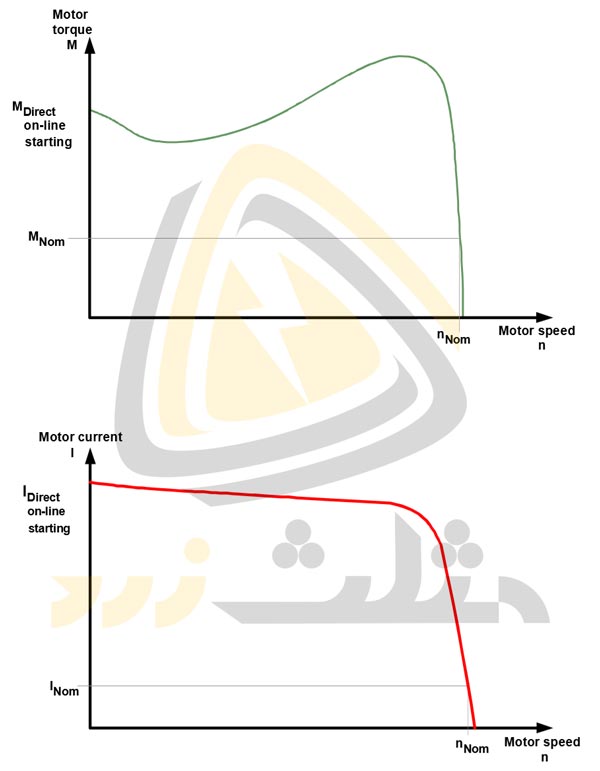
در برخی از سافتاستارترهای دیجیتال مانند زیمنس گزینهی تکضرب یا مستقیم نیز در لیست راهاندازیها وجود دارد. با انتخاب این گزینه دیگر نیازی به تنظیم مقادیر زمان راهاندازی، محدودیت جریان، گشتاور استارت و غیره نخواهد بود. در این روش که اصطلاحاً ولتاژ کامل نیز نام دارد، رفتار موتور شبیه به حالت راهاندازی کنتاکتوری بوده و حداکثر گشتاور و جریان را خواهد داشت.
در راهاندازی تکضرب ممکن است سافتاستارتر در حالت خطای اضافه جریان قرار بگیرد. برای رفع این مشکل یا باید حالت راهاندازی تغییر کند و یا یک سایز بزرگتر از سافتاستارتر را انتخاب کنید. در تصویر زیر گشتاور و جریان راهاندازی این مدل نمایش دادهشده است.
7.تنظیم پارامتر گرم کردن موتور یا Motor Heating
الکتروموتورهای نصبشده در فضای باز یا فضای سرد در معرض خطر تشکیل شبنم هستند. شبنم قطرات آبی است که به علت اختلاف دما در تجهیزات ایجاد میشود. به عبارت سادهتر اختلاف دما در هنگام کار و استراحت الکتروموتور باعث ایجاد قطرات آب در محفظه و بین سیمپیچها خواهد شد.
اگر در سیمپیچ الکتروموتور قطرات آب وجود داشته باشد، با وصل برق احتمال بروز نشتی جریان یا اتصال کوتاه بهشدت بالا خواهد رفت.
برای رفع این مشکل یک فانکشن خاص تحت عنوان گرم کردن موتور در برخی از سافتاستارترها وجود دارد. این فانکشن قبل از راهاندازی فعالشده و با تزریق پالسهای DC دمای سیمپیچ را افزایش میدهد. در نظر داشته باشید که این فانکشن یک حالت کاری پیوسته نبوده و فقط در اولین استارت شیفت کاری استفاده میشود.
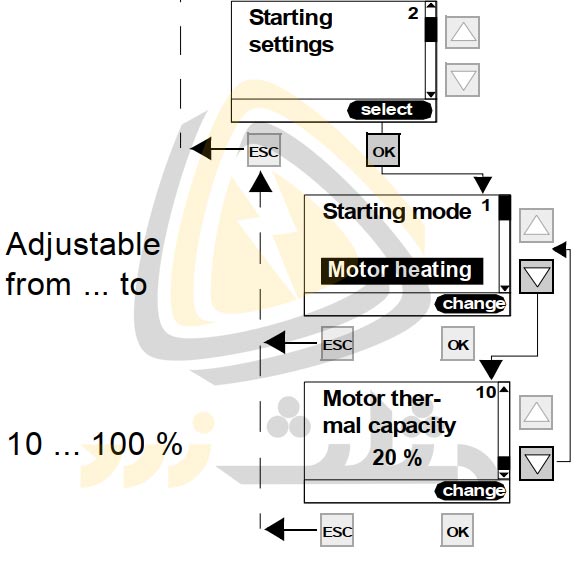
در صورت فعال کردن این فانکشن باید ظرفیت گرمایش سیمپیچ را بهدقت تنظیم کنیم. درصورتیکه این پارامتر بهدرستی تنظیم نشود احتمال افزایش دما و آسیب به سیمپیچها وجود دارد. بهمنظور افزایش سطح ایمنی الکتروموتور توصیهشده این فانکشن به همراه سنسور کنترل دما استفاده شود. این کار باعث خواهد شد تا ریسک آسیب به سیمپیچها در خلال گرمایش اولیه از بین برود.
در ضمن استفاده از این فانکشن در الکتروموتورهای مجهز به رلهی اضافهبار الکترونیک خارجی مناسب نیست. در سافتاستارترهای زیمنس پس از فعال کردن این فانکشن میتوان ظرفیت گرمایش را از 10 تا 100 درصد تنظیم کرد. این مقادیر به معنی تزریق 5 تا 30 درصد جریان نامی الکتروموتور در پروسهی گرمایش است.
8.جریان ثابت یا Constant Current
تنظیم پارامترهای سافت استارتر در برندهایی مانند دانفوس، اوکام و سانترنو بسیار محدود بوده و اغلب بر پایهی جریان است. بهعنوانمثال سافتاستارترهای ذکرشده دارای سه حالت راهاندازی جریان ثابت، جریان افزایشی و کنترل انطباقی هستند که در ادامه آنها را بررسی میکنیم. البته در این مدلها پالس اولیه یا Kick-Start نیز وجود دارد که میتوانید آن را با مد جریان ثابت و جریان افزایشی ترکیب کنید.
اولین حالت راهاندازی در این سافتاستارتر با عنوان جریان ثابت یا Constant Current مشخصشده است. مد جریان ثابت یکی از قدیمیترین حالتهای راهاندازی نرم بوده و کنترل ولتاژ در این روش بر اساس میزان جریان تنظیمی انجام میشود.
طبق تصویر زیر، با دریافت فرمان راهاندازی بلافاصله جریان از صفر تا مقدار تنظیم شده افزایش یافته و تا کامل شدن راهاندازی ثابت نگهداشته میشود. این روش شبیه به Current Limiting بوده و برای تأسیساتی استفاده میشود که جریان راهاندازی در آنها نباید از مقدار مشخصی بیشتر شود.
9.جریان افزایشی یا Current Ramp
در بخش تنظیم پارامترهای سافت استارتر، منحنی تغییرات جریان در این روش کمی نرمتر از حالت جریان ثابت بوده و میتوان از آن برای راهاندازی انواع تأسیسات استفاده کرد. ازجمله تأسیسات توصیهشده برای این روش راهاندازی عبارتاند از:
- تأسیسات با بارهای مختلف مانند نقالههای پر و خالی
- تأسیساتی که بار آنها یکباره خارجشده ولی باید زمان راهاندازی ثابتی داشته باشند.
- تأسیساتی که محدودیت توان دارند مانند زمان استفاده از دیزل ژنراتورها
در این روش با صدور فرمان راهاندازی بلافاصله جریان از صفر به مقدار اولیه افزایش یافته و در ادامه با زمان مشخص به مقدار محدودیت جریان خواهد رسید. با فعال شدن فانکشن محدودیت جریان، روند کنترل ولتاژ تغییر کرده و این حالت تا پایان راهاندازی موفق ادامه پیدا میکند. قابلذکر است که هر دو مقدار جریان اولیه و محدودیت جریان در این روش راهاندازی قابل تنظیم هستند. ازآنجاییکه افزایش جریان در این مدل بهصورت تدریجی انجام میشود، فرصت پاسخگویی برای منبع مخصوصاً دیزل ژنراتورها وجود خواهد داشت.
10.راهاندازی متناسب با شرایط موتور یا Adaptive Control
روش سوم راهاندازی در سافتاستارترهای دانفوس، اوکام و سانترنو حالت انطباقی ( در سافت استارترهای زیمنس این راهاندازی با عنوان Auto Parameterization شناخته میشود.) نام دارد. این روش بر اساس خصوصیات الکتروموتور و میزان بار متصل شده به آن کارکرده و دارای سه پروفایل مختلف است.
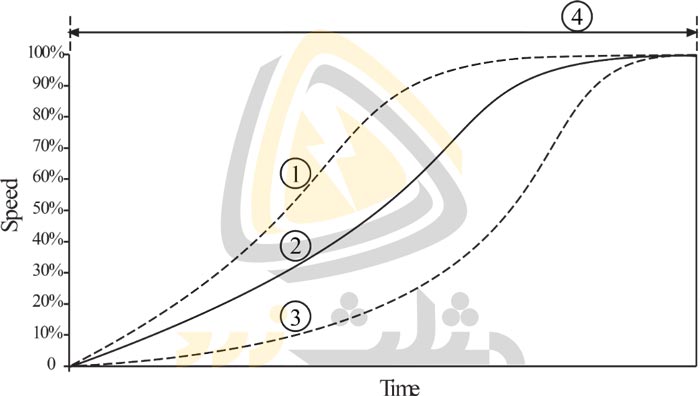
درواقع با تنظیم پارامترهای سافت استارتر و انتخاب حالت انطباقی و یک پروفایل راهاندازی، سافتاستارتر سعی میکند بهترین حالت کنترل را بر اساس بار الکتروموتور انجام دهد. به عبارت سادهتر الکتروموتور به نحوی کنترل خواهد شد تا بهترین انطباق را با پروفایل انتخابی داشته باشد. طبق تصویر زیر این سافتاستارترها دارای سه پروفایل راهاندازی مختلف هستند:
- راهاندازی سریع یا Early Acceleration
- راهاندازی ثابت یا Constant Acceleration
- راهاندازی طولانی یا Late Acceleration
حالت انطباقی از دو الگوریتم اندازهگیری و کنترل استفاده میکند. با اندازهگیری دقیق، مشخصههای الکتروموتور ترسیمشده و از آنها در کنترل ولتاژ استفاده میشود. این امر در راهاندازیهای اولیه بیشتر دیده میشود زیرا سافتاستارتر سعی دارد مشخصههای الکتروموتور را در سرعت صفر و حداکثر سرعت برداشت کند.
سافتاستارتر در راهاندازیهای بعدی تنظیمات را به نحوی تغییر میدهد تا پروفایل انتخابی با مشخصهی موتور کاملاً منطبق شود. بهعنوانمثال اگر سرعت واقعی برای پروفایل انتخابشده کم باشد، سافتاستارتر توان را بیشتر خواهد کرد. این روند بهصورت معکوس نیز صادق است یعنی اگر سرعت واقعی برای پروفایل انتخابی زیاد باشد، سافتاستارتر توان تزریقی به موتور را کاهش میدهد.
برای انتخاب و تنظیم حالت انطباقی باید به این نکتهها توجه کنید:
- حالت انطباقی، الکتروموتور را با توجه به پروفایل انتخابشده کنترل میکند.
- با انتخاب این روش الکتروموتور سریعتر از حالت تکضرب راهاندازی نخواهد شد.
- در این روش جریان بر اساس پروفایل انتخابی و زمان تنظیمشده کنترل میشود.
- اگر زمان راهاندازی بسیار کوتاه باشد، ممکن است جریان به سطح تکضرب برسد.
- هر تأسیساتی بر اساس نوع بار و الکتروموتور دارای یک پروفایل مشخص است.
- در اولین گام باید حالت انطباقی را از مد راهاندازی انتخاب کنیم.
- در مرحلهی بعدی باید زمان راهاندازی تنظیم شود.
- پس از تنظیم زمان باید پروفایل موردنظر را انتخاب کنید.
- این روش میتواند با محدودیت جریان نیز ترکیب شود.
- محدودیت جریان باید در حدی تنظیم شود که راهاندازی موفق باشد.
- تنظیم پائین محدودیت جریان باعث خطا هنگام راهاندازی خواهد شد.
برای دستیابی به بهترین نتیجه باید اطلاعات موتور بهدرستی در تنظیم پارامترهای سافت استارتر اعمال شود.
در نظر داشته باشید که در صورت تغییر الکتروموتور باید مراحل فوق را تکرار کنید. بهعنوانمثال اگر سافتاستارتر را با یک الکتروموتور کوچک تست کرده باشید، باید برداشت مشخصههای الکتروموتور اصلی را مجدد انجام دهید. برای برداشت خودکار اطلاعات توسط سافتاستارتر میتوانید یکی از حالتهای راهاندازی یا جریان نامی الکتروموتور ( FLC) را تغییر دهید. با این کار سافتاستارتر متوجه اتصال الکتروموتور جدید شده و مراحل موردنیاز را تکرار میکند.
11.سرعت پائین یا Jog
در قسمتهای قبلی مفهوم جاگ و روش استفاده از آن شرح داده شد. همانطور که میدانیم این قابلیت تنها برای زمان محدود قابلاستفاده بوده و میتواند موتور را در هر دو جهت با سرعت پائین کنترل کند.
تنظیمات مربوط به جاگ در سافتاستارترها متفاوت بوده و در برخی برندها برای حالت راستگرد و چپگرد بهصورت جداگانه انجام میشود. بهعنوانمثال درصورتیکه توالی اصلی بهصورت راستگرد باشد، میتوانید گشتاور جاگ را بین 50 تا 70 درصد تنظیم کنید اما این مقدار برای دور معکوس کمتر بوده و به 25 تا 50 درصد میرسد.
در نظر داشته باشید که بالا بردن گشتاور جاگ بیش از 50 درصد ممکن است باعث افزایش لرزش شفت الکتروموتور شود.
نکتهی مهم این است که به علت تولید حرارت زیاد و کاهش راندمان تهویه، نباید از جاگ بهصورت پیوسته استفاده کنیم. در ضمن در حالت جاگ راهاندازی و توقف نرم انجام نخواهد شد.
در ویدئوی زیر به معرفی سافت استارتر سانترنو و بررسی پلاک و ترمینال های فرمان سافت پرداختیم. این ویدئو برگرفته از دوره راه اندازی و حفاظت موتورهای سه فاز است.
 مثلث زرد
مثلث زرد
 مثلث زرد
مثلث زرد مثلث زرد
مثلث زرد  مثلث زرد
مثلث زرد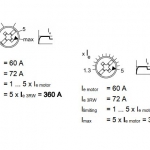
 مثلث زرد
مثلث زرد
دیدگاه خود را ثبت کنید
تمایل دارید در گفتگوها شرکت کنید؟در گفتگو ها شرکت کنید.