انواع توقف و ترمز موتور القایی
انواع توقف و ترمز موتور القایی
در سافت استارترهای دیجیتال روشهای مختلفی برای انتخاب نوع توقف و ترمز موتور القایی وجود دارد. برای تنظیم این پارامترها میتوانید از بخش راهاندازی سریع اقدام کرده و یا وارد منوی Stopping Mode شده و بهترین گزینه را انتخاب کنید.این منو برای سافت استارتر سری 44 زیمنس است.( ممکن است در برندهای دیگر عبارت Stop Mode یا موارد مشابه وجود داشته باشد.)
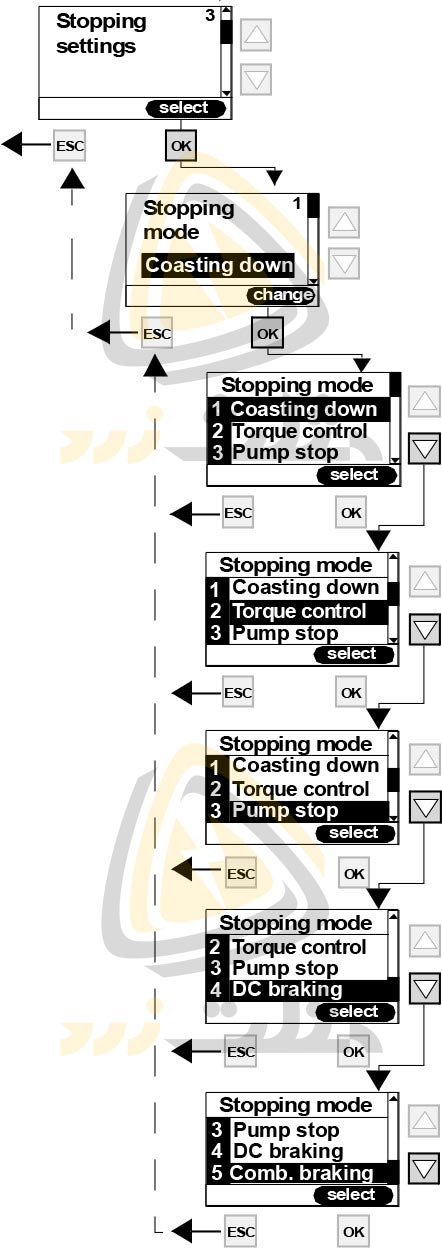
منوی Stopping Mode سافت استارتر سری 44 زیمنس
طبق تصویر زیر در بخش روش توقف ممکن است گزینههای مختلفی ازجمله قطع تغذیه، کنترل گشتاور، توقف پمپ، ترمز DC و ترکیبی از ترمز موتور القایی وجود داشته باشد.
این گزینهها با توجه به برند و روش اتصال سافتاستارتر متغیر بوده و قبل از هر اقدامی نیاز به بررسی دقیق دارند. بهعنوانمثال در حالت کنترل فازی یا 6 سیمه معمولاً ترمزهای جریان مستقیم غیرفعال و در دسترس نخواهند بود. در نظر داشته باشید که با توجه به روش توقف انتخابی، ممکن است نیاز به تنظیم چند پارامتر دیگر مانند زمان توقف، زمان ترمز موتور القایی، گشتاور و غیره نیز داشته باشید.
نکتهی مهم در انتخاب روش توقف این است که سافت استپ یا توقف نرم، زمان ایستادن الکتروموتور را طولانیتر از حالت قطع تغذیه کرده و ترمزها روندی معکوس دارند. بهعبارتدیگر با انتخاب ترمز DC، دینامیک و یا ترکیبی میتوانید الکتروموتور را سریعتر از حالت قطع تغذیه متوقف کنید. در صورت انتخاب توقف نرم و انواع ترمز موتور القایی، جریان توقف از جریان نامی موتور بیشتر شده و حتماً باید به سایز تجهیزات فیدر توجه کنید.
توقف با قطع تغذیه
سادهترین حالت توقف بهصورت قطع تغذیه بوده که با عنوانهای مختلفی مانند Coast to Stop یا Freewheel یا Direct Stop در منوی سافتاستارترها مشخص میشود. این روش مانند خاموش شدن کنتاکتور در مدارهای سنتی بوده و باعث رها شدن الکتروموتور یا اصطلاحاً Natural Run-Down میشود.
زمان توقف در این حالت وابستگی زیادی به اینرسی بار و الکتروموتور داشته و برای تأسیساتی مناسب است که نیاز به رفتار خاصی هنگام توقف ندارند. بهعنوانمثال از قابلیت قطع تغذیه میتوان در کنترل فن، کمپرسور، آسیاب، مخلوطکن و دیگر تأسیسات مشابه استفاده کرد.
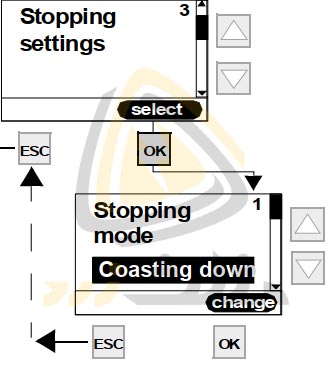
برای فعال کردن حالت قطع تغذیه باید وارد منوی تنظیمات توقف شده و این گزینه را انتخاب کرد. قابلذکر است که این روش سادهترین حالت توقف بوده و نیازی به تنظیمات دیگر مانند زمان، گشتاور و غیره ندارد.
این روش توقف برای تمام تأسیسات مناسب نبوده و ممکن است دو حالت توقف بسیار طولانی و یا توقف بسیار کوتاه را ایجاد کند. مثلاً در بارهایی که اینرسی بسیار بالایی دارند، قطع تغذیه باعث طولانی زمان ایستادن الکتروموتور شده و ممکن است خطراتی در پی داشته باشد. عکس این حالت نیز صادق بوده و توقف بسیار کوتاه مثلاً در الکتروپمپها باعث ایجاد تنشهای مکانیکی شدید خواهد شد.
برای رفع مشکلات ذکرشده باید از روشهای دیگر مانند توقف نرم بهصورت کنترل ولتاژ، کنترل گشتاور، توقف پمپ یا انواع ترمز موتور القایی استفاده کنیم. این موارد در ادامه بررسیشدهاند.
توقف با کنترل ولتاژ یا TVR
در این روش همانند توقف نرم در سافتاستارترهای آنالوگ، الکتروموتور با کاهش ولتاژ در یک زمان مشخص متوقف خواهد شد. بازهی این زمان قابل تنظیم بوده در تصویر زیر با عدد (1) مشخصشده است.
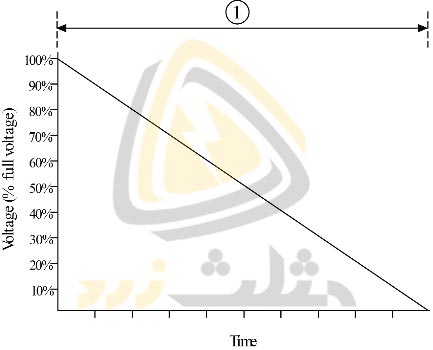
زمان توقف در حالت TVR (Timed Voltage Ramp) بیشتر از زمان توقف در حالت قطع تغذیه بوده و یک ایراد اساسی در کنترل بارهای بسیار سنگین دارد.
ازآنجاییکه این روش بازدارندگی خاصی مانند ترمز موتور القایی ندارد ممکن است پس از پایان پروسهی توقف، الکتروموتور و بار به چرخش خود ادامه دهند. به عبارت سادهتر این روش فقط برای طولانیتر کردن زمان توقف استفادهشده و توانایی نگهداشتن الکتروموتور بهصورت کامل را ندارد.
بهصورت کلی توقف نرم با کنترل ولتاژ یا TVR برای این تأسیسات مناسب است:
- تأسیساتی که نیاز به توقف نرم یا Soft Stop برای کاهش تنشهای مکانیکی دارند.
- تأسیساتی که باید در یک حداقل زمان مشخص متوقف شوند.
- تأسیساتی که تنشهای الکتریکی قطع ناگهانی بار مثلاً هنگام تغذیه از دیزل ژنراتورها باید در آنها کنترل شود.
کنترل ولتاژ در پروسهی توقف ممکن است با توجه به برند سافتاستارتر به شکلهای مختلفی مانند پلهای یا خطی تا مقادیر خاصی انجام شود. بحث کاهش ولتاژ پلهای در بخش مدهای توقف سافتاستارترهای آنالوگ شرح دادهشده است.
ازآنجاییکه دور الکتروموتورهای بدون بار با کاهش نرم ولتاژ تغییر زیادی نمیکند، فانکشنهای دیگر مانند کاهش ولتاژ پلهای طراحیشدهاند. روش کار Step Down Voltage به این شکل است که ….
توقف با کنترل گشتاور و توقف پمپ
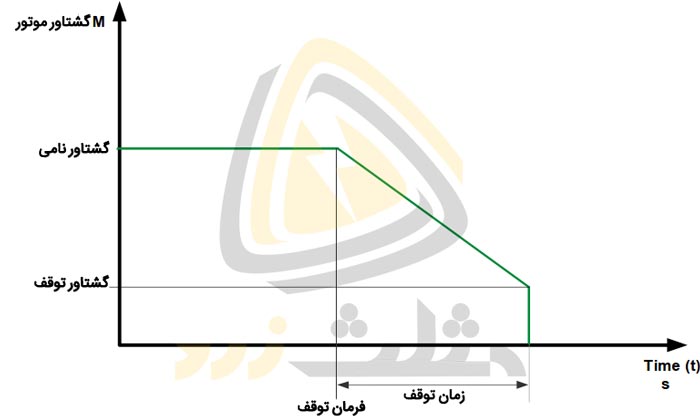
بهمنظور کاهش خطی نیروی تولیدی الکتروموتور، روش توقف با کنترل گشتاور ابداعشده است. همانگونه که در بخش حالتهای راهاندازی شرح داده شد، میزان گشتاور الکتروموتور توسط اندازهگیری ولتاژ، جریان و زاویهی بین آنها محاسبه خواهد شد. این پروسه در توقف الکتروموتور نیز انجامشده و مبنای کنترل ولتاژ خروجی سافتاستارتر است.
بهعبارتدیگر کنترل گشتاور در این روش از تنشهای مکانیکی توقف یکباره جلوگیری کرده و زمان ایستادن الکتروموتور را طولانیتر میکند. برای استفاده از حالت کنترل گشتاور باید اطلاعات موتور مانند جریان و گشتاور نامی آن را در سافتاستارتر تنظیم کنیم.
پس از انتخاب روش توقف با کنترل گشتاور باید دو پارامتر زمان و گشتاور توقف را نیز تنظیم کنیم. هر یک از این پارامترها به این منظور مشخص میشوند:
- زمان: زمان توقف تعیینکنندهی این است که در چه بازهای پس از دریافت فرمان توقف، ولتاژ باید به موتور اعمال شود.
- گشتاور توقف: این پارامتر مشخصکنندهی گشتاور حداقل است. بهعبارتدیگر با دریافت فرمان توقف، گشتاور نامی بهصورت خطی کاهش دادهشده و به این مقدار خواهد رسید.
توقف انطباقی
حالت کنترل انطباقی در سافتاستارترهای دانفوس، اوکام و سانترنو برای توقف نیز استفاده میشود. کافی است این مد را انتخاب کرده و علاوه بر تنظیم زمان توقف، یکی از پروفایلهای زیر را انتخاب کنید:
- توقف سریع یا Early Deceleration
- توقف ثابت یا Constant Deceleration
- توقف طولانی یا Late Deceleration
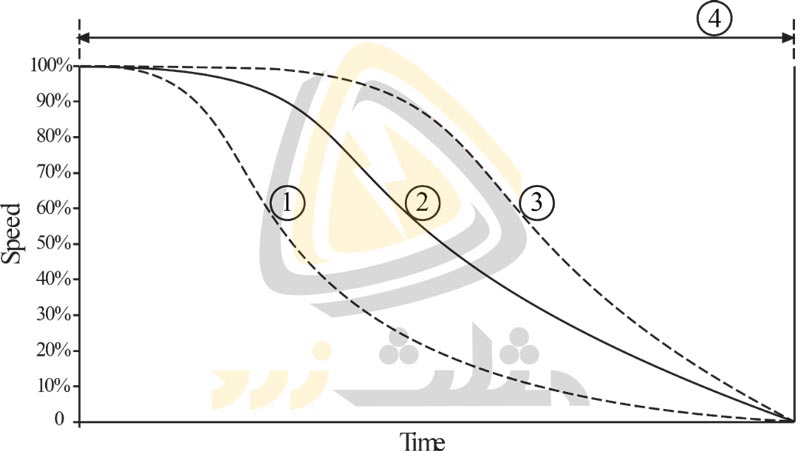
هنگام انتخاب مد انطباقی برای توقف باید به این نکته توجه کنید که هیچ یک از پروفایلهای فوق باعث کوتاهتر شدن زمان توقف الکتروموتور نسبت به حالت قطع تغذیه نخواهد شد. بهعبارتدیگر برای کاهش زمان توقف باید از حالتهای ترمز موتور القایی استفاده کنید.
اولین توقف در مد انطباقی بهصورت Soft Stop معمولی بوده و برای برداشت اطلاعات الکتروموتور انجام میشود. اطلاعات برداشتشده در توقفهای بعدی استفاده میشود تا بهترین هماهنگی با پروفایل انتخابشده صورت بگیرد.
در صورت تعویض الکتروموتور باید پروسهی برداشت اطلاعات تکرار شده تا اصطلاحاً سافتاستارتر مشخصههای موتور جدید را یاد بگیرد. برای انجام این کار بهصورت دستی باید جریان نامی الکتروموتور یا روش توقف را تغییر دهید.
توقف سریع: پمپهای سیکل باز. محلهایی که هنگام توقف باید مایع از پمپ عبور کند ولی دور آن برعکس نشود.توقف انطباقی برای کاهش تنشهای مکانیکی یا ضربات چکشی آب در انواع الکتروپمپ نیز استفاده میشود. ازآنجاییکه مشخصههای کاری پمپها فوقالعاده متنوع است، نمیتوان زمان توقف و پروفایل یکسانی برای آنها در نظر گرفت. به همین علت پروفایلها با توجه به نوع پمپ مشخص میشوند بهعنوانمثال:
- توقف ثابت: پمپ با هد کوچک تا متوسط. تأسیساتی که فلو در آنها بسیار زیاد است.
- توقف طولانی: پمپ با هد بزرگ. تأسیساتی که حتی کاهش ناچیز سرعت پمپ باعث ایجاد تنش رفت و برگشت در مایع خواهد شد.
شرکت دانفوس برای راهاندازی و توقف الکتروپمپها حالت کنترل انطباقی با زمانهای زیر را توصیه کرده است. در نظر داشته باید این مقادیر پیشنهادی بوده و ممکن است با توجه به نوع تأسیسات نیاز به ویرایش داشته باشند.
| پمپ شناور | مقادیر توصیهشده |
| جریان بار کامل | پلاک یا نیمپلیت |
| نوع راهاندازی | انطباقی |
| پروفایل راهاندازی | راهاندازی سریع |
| زمان راهاندازی | 5 ثانیه |
| نوع توقف | انطباقی |
| پروفایل توقف | توقف طولانی |
| زمان توقف | 5 ثانیه |
| پمپ سانتریفیوژ | مقادیر توصیهشده |
| جریان بار کامل | پلاک یا نیمپلیت |
| نوع راهاندازی | انطباقی |
| پروفایل راهاندازی | راهاندازی سریع |
| زمان راهاندازی | 10 ثانیه |
| نوع توقف | انطباقی |
| پروفایل توقف | توقف طولانی |
| زمان توقف | 15 ثانیه |
انواع ترمز موتور القایی
برای کاهش زمان توقف نسبت به قطع تغذیه میتوان از حالتهای ترمز دینامیک، ترمز جریان مستقیم و یا ترکیب آنها استفاده کرد.( ترمز موتور القایی ترکیب شده برای بارهای کوچک و ترمز DC برای بارهای بزرگ)
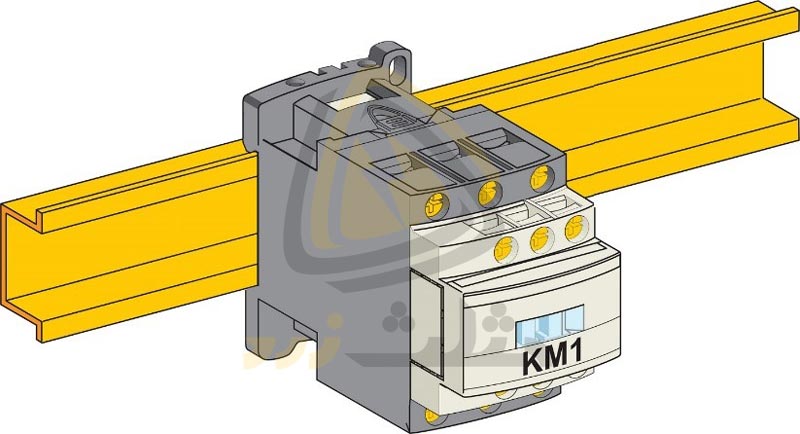
طبق تصویر زیر در مدارهای قدیمی از یک اتوترانسفورماتور و پل دیود برای ایجاد جریان مستقیم قابل کنترل استفاده میشده است. در این روش جریان DC تولیدی توسط یک کنتاکتور به دو فاز الکتروموتور متصل شده و گشتاور ترمز ایجاد میکند.
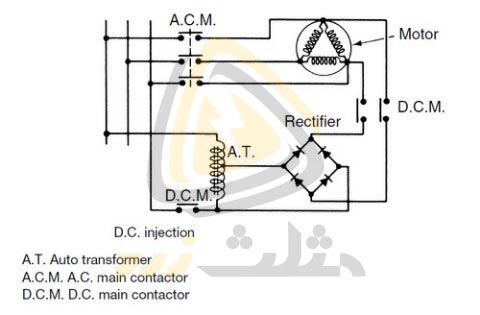
کنتاکتور ترمز با کنتاکتور اصلی دارای اینترلاک الکتریکی، مکانیکی و یا هر دو بوده تا هرگز با یکدیگر وارد مدار نشوند. امروزه تمام این قابلیتها یعنی ترمز جریان مستقیم با زمان و گشتاور قابل کنترل در سافتاستارترهای دیجیتال وجود داشته و نیازی به مدار خارجی نیست. البته همانگونه که قبلاً شرح داده شد ( در سافت استارترهای زیمنس به کنتاکتور برای ترمز نیاز است.) با توجه به برند سافتاستارتر ممکن است به یک یا دو کنتاکتور در مدار ترمز نیاز داشته باشید.
این مسئله یعنی نیاز به نصب کنتاکتور در خروجی سافتاستارترهای دانفوس، اوکام و سانترنو مرتفع شده و ضمن کاهش هزینهی تجهیزات، حرارت ناشی از ترمز در تمام سیمپیچ توزیع خواهد شد.
با توجه به افزایش شدید جریان هنگام استفاده از ترمزها باید مطمئن شوید که تجهیزات فیدر بهدرستی سایز شده باشند. برای به حداکثر رساندن حفاظت در این روش توصیهشده از سیستم اضافهبار و سنسور حرارتی نیز استفاده کنید.
از نکتههای دیگر برای استفاده از ترمزها، انتخاب صحیح مد و تنظیم گشتاور است. اگر گشتاور ترمز بسیار بالا باشد موتور قبل از پایان زمان ترمز، متوقفشده و حرارت آن بهشدت بالا خواهد رفت. از طرفی اگر گشتاور پائین باشد، ممکن است پس از پایان زمان ترمز الکتروموتور متوقف نشود.
برای رفع مشکلات فوق میتوان از سنسور سرعت صفر استفاده کرده و یا تنظیمات را با توجه به میزان بار انجام داد. در نظر داشته باشید که در خلال ترمز، صدای الکتروموتور افزایش یافته و این یک پدیدهی نرمال است.
مطالبی که در حال مطالعه ی آن هستید به صورت تصویری در دوره جامع راه اندازی و حفاظت موتور سه فاز آموزش داده شده است. در این دوره تصویری روش پلاک خوانی موتور، شناخت اصول حفاظت، شناخت تجهیزات راه اندازی و محاسبه سایز آن ها آموزش داده شده است. در بخش عملی می توانید سیم بندی راه اندازی های کنتاکتوری مانند تک ضرب، چپ گرد و راست گرد، ستاره مثلث به همراه نصب و سیم بندی 6 برند سافت استارتر زیمنس، اشنایدر، ABB، دانفوس، اوکام و سانترنو را مشاهده کنید. قسمت آخر دوره مربوط به بازدید از تاسیسات و تابلو برق های مختلف و بررسی چیدمان تجهیزات و سایز آن ها در تابلو برق است. جهت کسب اطلاعات بیشتر در خصوص این دوره می توانید صفحه آموزش جامع راه اندازی و حفاظت موتورهای سه فاز را مشاهده کنید.
ازآنجاییکه ترمز موفقیتآمیز به سرعت الکتروموتور بستگی دارد، برخی از سافتاستارترها دارای مراحل مختلف پیش ترمز و ترمز کامل هستند. حداکثر گشتاور ترمز معمولاً در کمتر از 70 درصد دور نامی الکتروموتور ایجادشده و قبل از آن راندمان بالایی ندارد. به همین علت طبق تصویر زیر با پیش ترمز سرعت تا حدود 70 درصد دور نامی کاهش دادهشده و بعدازآن گشتاور اصلی ترمز با جریان DC تولید میشود.
در تصویر زیر بازهی مشخصشده با عدد (1) مربوط به کل زمان ترمز و بازهی شمارهی (2) مربوط به ترمز کامل است. همانگونه که مشاهده میکنید پروسهی ترمز باعث توقف الکتروموتور با زمان کوتاهتری نسبت به قطع تغذیه خواهد شد. منحنی قطع تغذیه با شمارهی (3) این اختلاف را بهخوبی نمایش میدهد.
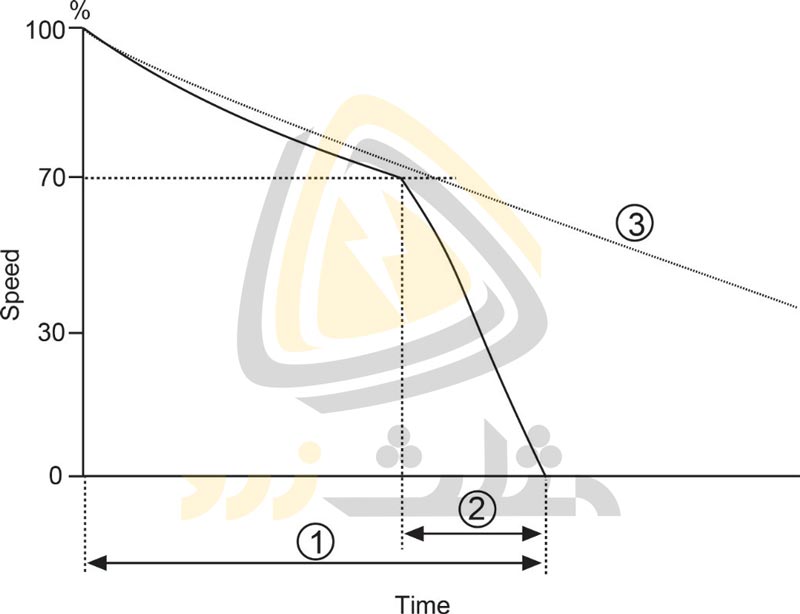
برای دستیابی به بهترین نتیجه باید زمان توقف کامل را بیشتر از زمان ترمز تنظیم کنیم. در نظر داشته باشید که اگر زمان توقف خیلی کوتاه باشد ترمز موفقیتآمیز نخواهد بود. بهصورت نرمال زمان ترمز 25 درصد زمان توقف است. پارامتر مهم بعدی میزان گشتاور ترمز است که در خصوص کم یا زیاد بودن آن توضیحات کافی ارائهشده است.
برای داشتن یک ترمز مؤثر توصیهشده است که فازهای ورودی را با توالی مثبت به ترمینالهای L1,L2,L3 متصل کرده و حفاظت ولتاژی را فقط روی توالی مثبت (حفاظت توالی فاز میتواند به صورت فقط مثبت، فقط منفی و یا هردو باشد.) قرار دهیم. با این کار اگر توالی در ورودی سافتاستارتر تغییر کند، خطای Phase Sequence ایجادشده و موتور راهاندازی نخواهد شد. توالی مثبت برای مراحل پیش ترمز و کاهش اولیهی سرعت مؤثرتر از توالی منفی یا چپگرد است.
در ترمز ترکیبشده باید پارامترهای میزان گشتاور ترمز دینامیک، گشتاور ترمز DC و زمان توقف را تنظیم کنیم. این پارامترها تعیینکنندهی رفتار سافتاستارتر در کل پروسهی توقف هستند.
طبق تصویر زیر در خلال کار عادی گشتاور بهصورت مثبت و کامل بوده و الکتروموتور وضعیت نرمالی دارد. با حذف فرمان راهاندازی یا دریافت فرمان توقف، گشتاور مثبت بهیکباره قطعشده و بلافاصله گشتاور معکوس تولید میشود. در مراحل اولیه توقف، گشتاور ترمز دینامیک بهصورت متناوب سرعت موتور را کاهش داده و بعدازآن گشتاور DC به الکتروموتور اعمال میشود. همانگونه که مشاهده میکنید گشتاور DC کاملاً یکنواخت بوده و تا پایان زمان ترمز ادامه خواهد داشت.
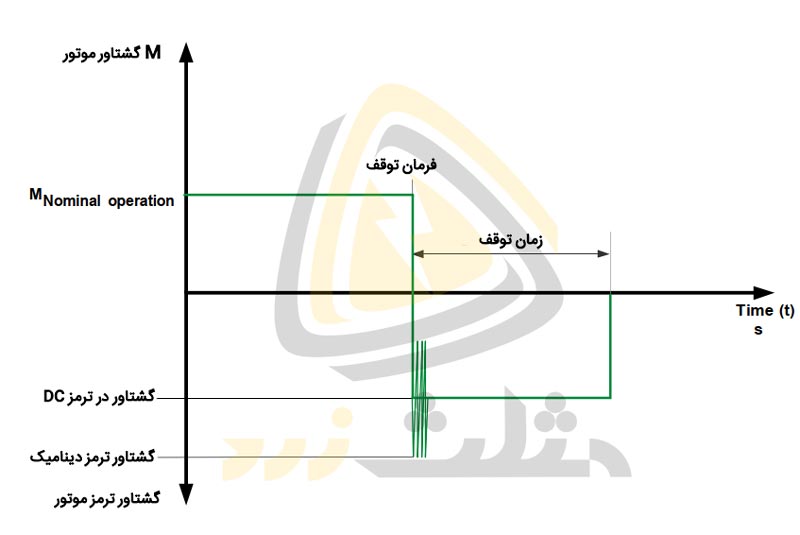
همانگونه که شرح داده شد میزان گشتاور DC تعیینکنندهی نیروی معکوس تولیدی روی شفت است. پس اگر در خلال ترمز DC الکتروموتور دوباره سرعت گرفت، باید گشتاور DC را افزایش دهیم. علاوه بر این زمان توقف نیز باید به حدی طولانی باشد که بار کاملاً متوقف شود.
ازآنجاییکه سافتاستارترها توانایی تشخیص سرعت صفر را ندارند، توصیهشده است با فعال کردن ترمز جریان مستقیم از سنسور تشخیص سرعت صفر نیز استفاده شود.
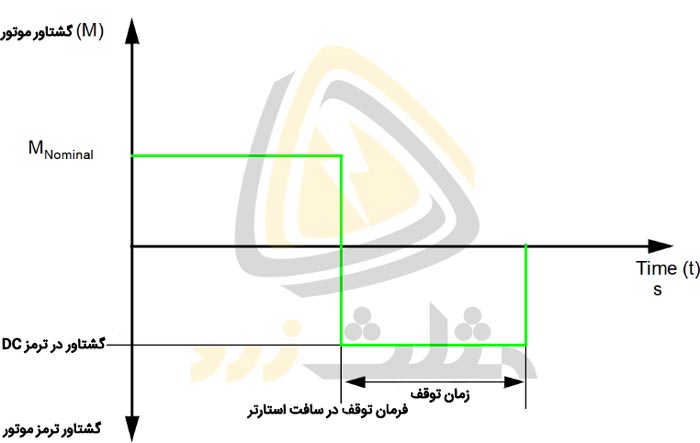
درصورتیکه نیاز باشد میتوان ترمز دینامیک را از پروسهی توقف حذف کرده و تنها از ترمز جریان مستقیم استفاده کنیم. در این روش تنها باید گشتاور DC و زمان توقف را تنظیم کرده و ترمز موتور القایی را در بار کامل الکتروموتور تست کنیم. طبق تصویر در این روش پس از حذف فرمان راهاندازی یا دریافت فرمان توقف، بلافاصله گشتاور معکوس با جریان مستقیم تولیدشده و تا پایان زمان توقف ادامه خواهد داشت.
در اغلب سافتاستارترها استفاده از ترمز DC و ترکیبی در حالت کنترل فازی امکانپذیر نیست.
 مثلث زرد
مثلث زرد مثلث زرد
مثلث زرد  مثلث زرد
مثلث زرد
 مثلث زرد
مثلث زرد مثلث زرد
مثلث زرد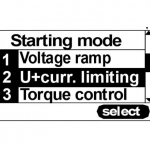
 مثلث زرد
مثلث زرد
دیدگاه خود را ثبت کنید
تمایل دارید در گفتگوها شرکت کنید؟در گفتگو ها شرکت کنید.