سافت استارتر دیجیتال زیمنس
سافت استارتر دیجیتال زیمنس
در این مقاله به بررسی نصب و سیم بندی سافت استارتر دیجیتال زیمنس سری 44 و سری 55 میپردازیم.
- سافت استارتر دیجیتال زیمنس
- سافت استارتر دیجیتال زیمنس سری 44
- 1.کنترل با استارت و استپ
- 2.کنترل با سوئیچ
- 3.کنترل با پیالسی (PLC) سافت استارتر دیجیتال
- 4.کنترل با پیالسی و ترمز DC سافتاستارتر
- 5.کنترل بهصورت چپگرد و راستگرد سافت استارتر
- 6.کنترل با گشتاور پائین یا جاگ در سافت استارتر
- 7.کنترل بهصورت فازی یا داخل مثلث سافت استارتر دیجیتال
- 8.کنترل 3 الکتروموتور موازی
- 9.کنترل 3 الکتروموتور ترتیبی با سافت استارتر
- 10.کنترل بهصورت لوکال و ریموت
- سافت استارتر دیجیتال زیمنس سری 55
- سافت استارتر دیجیتال زیمنس سری 44
سافت استارتر دیجیتال زیمنس سری 44
سافت استارتر دیجیتال زیمنس سری 44 سه فاز به همراه بایپس داخلی است. این دستگاه با کلاس حفاظتی قابل تنظیم از 10 تا 30، برای راهاندازیهای بسیار سنگین مناسب میباشد. از مزایای این سافتاستارتر میتوان به قابلیت ترمز، اندازهگیری و کنترل کمیتهای الکتریکی، ورودی دما، چهار ورودی دیجیتال قابلبرنامهریزی، سه خروجی دیجیتال قابلبرنامهریزی، کارتهای توسعه، ارتباط با کامپیوتر و غیره اشاره کرد. در ادامه تعدادی از مدارهای پرکاربرد این سری را بررسی میکنیم.

1.کنترل با استارت و استپ
در اولین قدم راهاندازی این سافت استارتر توسط شستی استارت و استپ را بررسی میکنیم.
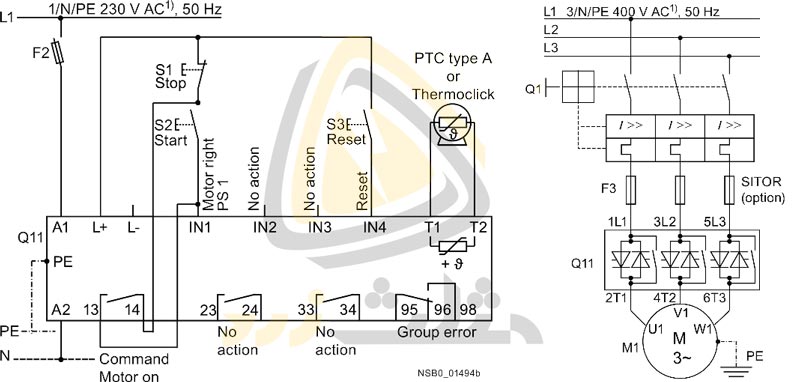
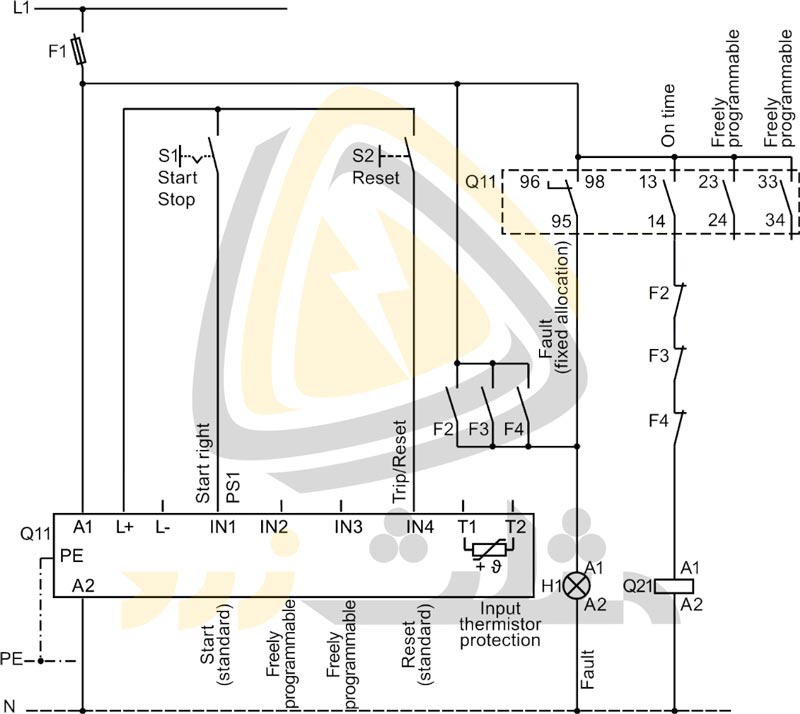
در مدار قدرت از بریکر و فیوزهای آپشنال نیمههادی برای ایجاد تیپ 2 کوردینه سازی استفادهشده است. در نظر داشته باشید که این سافتاستارتر بهصورت داخلی دارای سیستم حفاظتی بوده ولی این مورد در نقشه نمایش داده نشده است. در بخش فرمان فیوز F2 نقش حفاظت تغذیهی سافتاستارتر را بر عهده دارد. با بسته شدن این کلید فیوز، تغذیهی A1 دایر شده و با توجه به اتصال مستقیم سیم نول، سافتاستارتر روشن خواهد شد.
مدار کنترل این سافتاستارتر بهصورت DC بوده و باید از پایانههای L+ و L- تأمین شود. قبل از اقدام به سیمبندی به این نکته توجه کنید که اتصال هرگونه ولتاژ غیرمتعارف به بخش کنترل، باعث آسیب به سافتاستارتر خواهد شد.
در مثال فوق ترمینال L+ از منبع تغذیهی داخلی، به ورودی شستی استپ S1 متصل شده است. در ادامه خروجی شستی استپ بهصورت همزمان وارد شستی استارت S2 و اولین خروجی فرمان قابلبرنامهریزی 14 میشود. این پلاتین فرمان نقش پایدارکننده را داشته و باید فانکشن مناسب را برای آن تنظیم کنیم. در این مدار فانکشن باید بهصورت Command Motor On باشد.
سمت دیگر پلاتین فرمان 13 به همراه خروجی شستی استارت S2 به ترمینال In1 یا اولین ورودی قابلبرنامهریزی متصل میشود. در این روش با فشردن شستی استارت، سافتاستارتر راهاندازی شده و پلاتین فرمان خود را میبندد. ازآنجاییکه این پلاتین یک پایدارکننده بوده و با شستی استارت موازی شده است، سافتاستارتر را روشن نگه میدارد.
برای توقف الکتروموتور کافی است شستی استپ را فشار دهیم. با این کار مسیر ورودی In1 قطعشده و بلافاصله پلاتین فرمان باز میشود. با قطع ورودی اول سافتاستارتر در مد توقف قرار میگیرد. توقف در این مدل میتواند بهصورت نرم، قطع تغذیه یا انواع ترمز باشد.
علاوه بر استپ نرمال، رخ دادن هرگونه خطا نیز باعث توقف مدار فوق خواهد شد. معمولاً رخ دادن خطا باعث قطع تغذیهی الکتروموتور شده و برای راهاندازی مجدد نیاز به ریست سافتاستارتر است. در سافتاستارترهای دیجیتال حالتهای مختلفی برای ریست بهصورت ریموت، لوکال و خودکار وجود دارد. بهعنوانمثال در نقشهی فوق، ورودی دیجیتال شماره 4 برای ریست ریموت در نظر گرفتهشده است.
همانگونه که مشاهده میکنید، در کنار ورودیهای شمارهی 2 و 3 عبارت No Action درجشده است. این عبارت به معنی غیرفعال بودن این ورودیها در کنترل سافتاستارتر است. بهعنوانمثال برای ایجاد یک مدار تریپ خارجی یا توقف اضطراری، میتوان از این ورودیها استفاده کرد. کافی است وارد منو شده و قسمت Inputs را انتخاب کنید. در این منو میتوانید هر یک از ورودیهای دیجیتال را انتخاب کرده و فانکشن آن را ویرایش کنید.
این روند برای تنظیم خروجیهای دیجیتال نیز صادق است. طبق تصویر در کنار خروجی 2 و 3 نیز عبارت No Action یا بدون استفاده نوشتهشده است. برای تنظیم این خروجیها کافی است وارد منو شده و قسمت Outputs را ویرایش کنید.
علاوه بر موارد شرح دادهشده، در بخش کنترل این سافتاستارتر یک پلاتین چنجآور با عنوان Group Error و ورودی سنسور دما نیز وجود دارد.
2.کنترل با سوئیچ
برای کنترل این سافتاستارتر توسط یک سوئیچ، حالتهای مختلفی امکانپذیر است. بهعنوانمثال میتوان تغذیهی سافتاستارتر را بهصورت دائم متصل کرده و از یک سوئیچ در مسیر L+ و In1 استفاده کرد. در این مدار هنگام رخ دادن خطا باید از ورودیهای دیگر برای ریست ریموت استفاده کنیم.
برای سادهتر کردن بخش کنترل، میتوان از دیاگرام زیر استفاده کرد. در این حالت ترمینال L+ مستقیم به In1 وصل شده و تغذیهی سافتاستارتر توسط سوئیچ S1 قطع و وصل میشود.
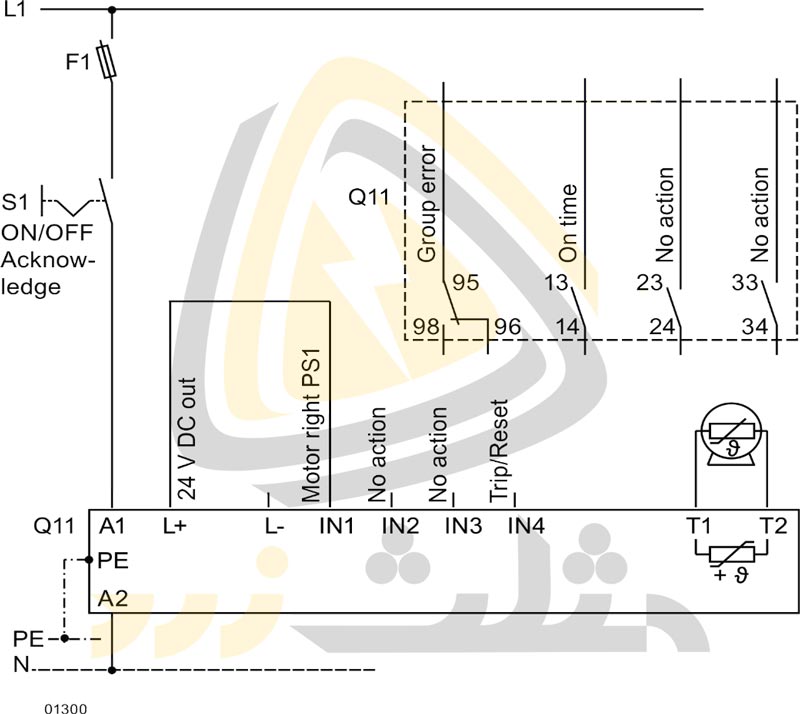
با توجه به لینک مستقیم L+ به In1، وصل سوئیچ S1 باعث روشن شدن سافتاستارتر و راهاندازی الکتروموتور خواهد شد. در این مدار با قطع سوئیچ میتوان سافتاستارتر را متوقف کرده و یا خطاهای رخداده را ریست کرد. به همین علت در کنار سوئیچ S1 عبارت Acknowledge به معنی پذیرفتن درجشده است. در دیاگرام بالا از ورودیها و خروجیهای قابلبرنامهریزی دیگر استفادهنشده است.
3.کنترل با پیالسی (PLC) سافت استارتر دیجیتال
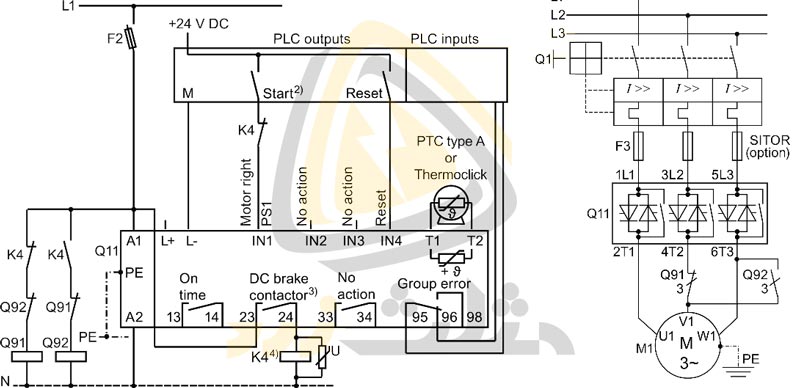
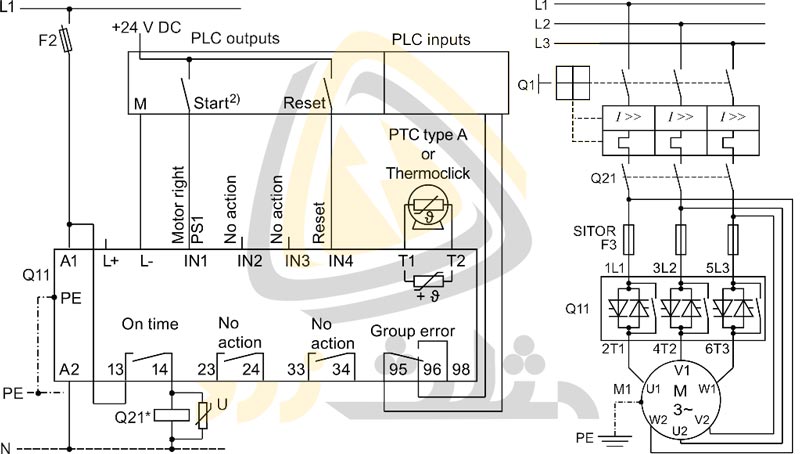
با توجه به 24 ولت بودن بخش فرمان این سافتاستارتر، بهسادگی میتوان آن را توسط رلهها، سنسورها و PLC ها کنترل کرد. برای این کار میتوان از منبع تغذیهی خود سافتاستارتر و یا تغذیهی خارجی استفاده کرد.
همانگونه که در بخشهای قبلی شرح داده شد نکتهی مهم هنگام استفاده از منبع تغذیهی خارجی، وجود یک نقطهی مشترک یا همپتانسیل است. در دیاگرام زیر این کار با اتصال پایانهی منفی پاور PLC به نام M به پایانهی منفی سافتاستارتر به نام L- انجامشده است. با ایجاد این نقطهی مشترک، ولتاژ 24+ از منبع تغذیهی PLC بهعنوان یک ورودی در سافتاستارتر شناخته میشود. در این مدار دو ورودی راهاندازی In1 و ریست In4 توسط PLC با منبع تغذیهی خارجی کنترل میشود.
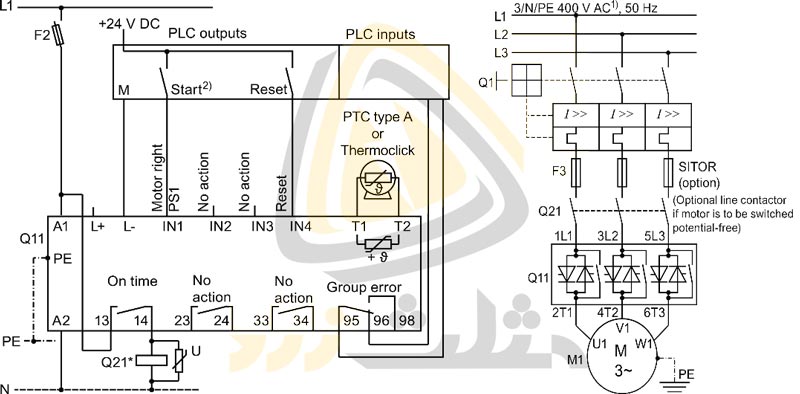
در مدار قدرت از یک کنتاکتور با عنوان Q21 استفادهشده که بوبین آن توسط ترمینالهای 13 و 14 کنترل میشود. وجود علامت ستاره در کنار بوبین این کنتاکتور به معنی آپشنال بودن آن است. در این حالت فانکشن رلهی فرمان روی On Time تنظیمشده تا امکان استفاده از کلیهی قابلیتها مانند سافتاستارت، سافتاستپ، ترمزها و غیره وجود داشته باشد. برای تغییر در فانکشن ورودی موردنظر، باید وارد منوی Inputs شده و گزینهی موردنظر خود را از لیست انتخاب کنید. برای مشخص شدن وضعیت خطا در سافتاستارتر، ترمینال Group Error به PLC متصل شده است. با این کار کنترلر از رخ دادن خطا مطلع شده و میتواند از ورودی ریست یا In4 برای راهاندازی مجدد استفاده کند.
4.کنترل با پیالسی و ترمز DC سافتاستارتر
همانگونه که میدانیم تایرستورها عنصر کنترلکنندهی ولتاژ در سافتاستارتر هستند. از طرفی در هر فاز از سافتاستارتر، دو تایرستور بهصورت معکوس نصبشده تا کنترل ولتاژ در هردو نیم سیکل مثبت و منفی انجام شود. پس اگر در هر فاز یکی از تایرستورها خاموش شود، ولتاژ خروجی سافتاستارتر بهصورت DC خواهد بود.
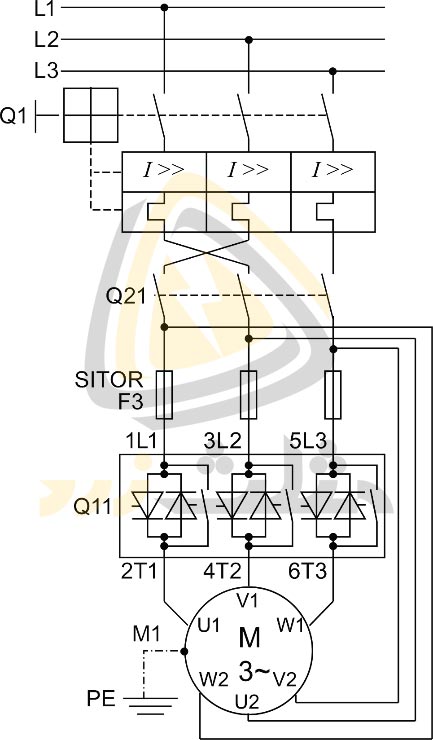
یکی از قابلیتهای سافتاستارتر دیجیتال، تولید جریان DC برای ترمز الکتروموتور است. برای استفاده از این قابلیت در برخی از مدلها مانند سری 44 به یک یا دو کنتاکتور قدرت نیاز است. در دیاگرام زیر استفاده از یک کنتاکتور در مدار قدرت با عنوان Q91 را مشاهده میکنید.
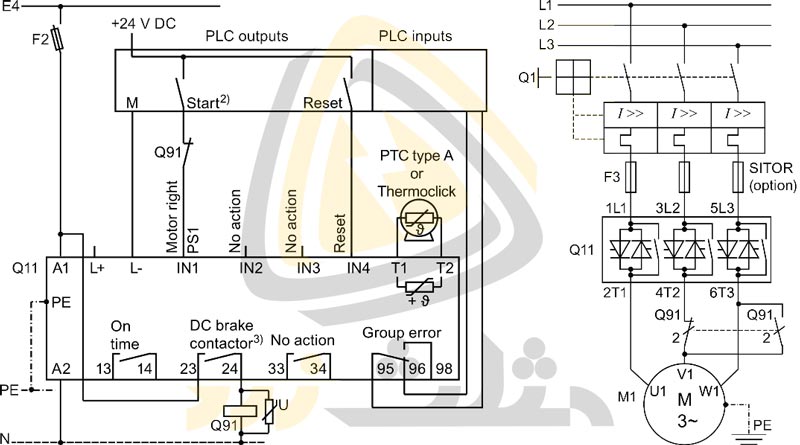
کنتاکتور فوق دارای دو پلاتین قدرت بهصورت N.C و N.O است. پلاتین N.C در مسیر فاز وسط قرارگرفته و در حالت عادی الکتروموتور را به سافتاستارتر متصل میکند. با دریافت فرمان ترمز، این پلاتین باز شده و فاز وسط الکتروموتور توسط پلاتین N.O به فاز سوم متصل خواهد شد.
علت استفاده از این کنتاکتور در روند ترمز، اعمال پلاریتهی مثبت و منفی به فازهای 1 و 3 است. بهعبارتدیگر سافتاستارتر ولتاژ DC تولیدشده را به فازهای 1 و 3 تزریق کرده و فاز 2 بدون انرژی باقی میماند. عدم اتصال فاز 2 به قطبهای دیگر در خلال ترمز باعث ایجاد مشکلاتی مانند کاهش نیروی مغناطیسی و افزایش حرارت بهصورت توزیع نشده در سیمپیچ الکتروموتور خواهد شد.
برای فعال شدن قابلیت ترمز DC باید وارد منوی Stopping Mode شده و گزینهی DC Braking را انتخاب کنیم. با این کار بلافاصله بعد از حذف فرمان راهاندازی، ترمز DC فعال میشود. میزان گشتاور ترمز از 20 تا 100 درصد و زمان آن از 0 تا 360 ثانیه قابل تنظیم است.
ازآنجاییکه کنترل کنتاکتور ترمز باید توسط سافتاستارتر انجام شود، میتوان یکی از خروجیهای دیجیتال را روی فانکشن DC Brake Contactor تنظیم کرد. در دیاگرام صفحهی قبل، خروجی 2 با ترمینالهای 23 و 24 برای این کار در نظر گرفتهشده است.
اگر کنتاکتور Q91 در خلال کار عادی سافتاستارتر روشن شود، الکتروموتور دو فاز شده و بهسرعت آسیب میبیند. برای جلوگیری از رخ دادن این خطا، پلاتین فرمان N.C کنتاکتور فوق در مسیر ورودی In1 قرار دادهشده است.
استفاده از ترمز DC در حالت فازی یا نصب داخل مثلث امکانپذیر نیست.
در تصویر زیر استفاده از دو کنتاکتور مجزا در بخش قدرت را مشاهده میکنید. در این مثال برای انجام فرایند ترمز، کنتاکتور Q91 اتصال فاز وسط از سافتاستارتر را قطع کرده و کنتاکتور Q92 اتصال آن به فاز سوم را انجام میدهد. برای عملکرد این کنتاکتورها از یک رلهی فرمان با عنوان K4 استفادهشده است. با بستن شدن پلاتین 23 و 24 سافتاستارتر با فانکشن DC Brake Contactor، رلهی K4 روشنشده و ابتدا کنتاکتور Q91 را خاموش میکند. پس از خاموش شدن Q92 و با تأخیر چند میلیثانیهای، کنتاکتور Q92 بسته و ترمز انجام میشود.
5.کنترل بهصورت چپگرد و راستگرد سافت استارتر
تغییر جهت گردش در سافتاستارتر دیجیتال به دو صورت گشتاور کامل و گشتاور پائین یا Jog انجام میشود. برای کار در گشتاور کامل باید از دو کنتاکتور در ورودی سافتاستارتر استفاده کنیم اما برای حالت جاگ نیازی به این کار نیست. در ادامه تغییر جهت گردش با دو حالت گشتاور کامل بدون سافتاستپ و گشتاور کامل با سافتاستپ را در سافتاستارترهای سری 44 بررسی میکنیم.
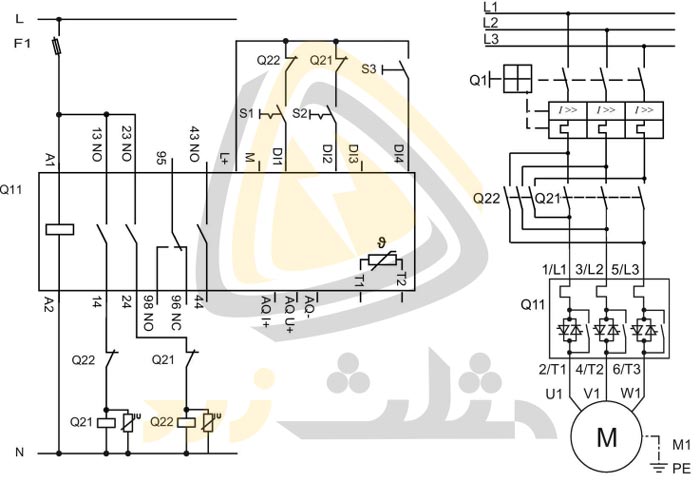
اگر نیازی به قابلیتهای توقف نرم یا ترمز نباشد، میتوانیم از دو کنتاکتور برای جابجایی فاز و کار بهصورت گشتاور کامل در هردو جهت استفاده کنیم. این روند دقیقاً شبیه به مدار چپگرد و راستگرد در سافتاستارترهای آنالوگ است. برای درک بهتر این موضوع، دیاگرام زیر را مشاهده کنید.
در مدار فوق کنتاکتور Q21 برای حالت راستگرد و Q22 برای حالت چپگرد در نظر گرفتهشدهاند. این کنتاکتورها قبل از سافتاستارتر نصبشده و جای دو فاز ورودی را عوض میکنند. در بالاییترین سطح مدار فرمان از پلاتین خطا یا Group Error استفادهشده است. با این کار اگر سافتاستارتر به هر علتی در وضعیت خطا قرار بگیرد، مدار کنتاکتورها و در نتیجه ورودی قدرت سافتاستارتر قطع خواهد شد.
با فشردن شستی S1 کنتاکتور Q21 روشنشده و پلاتین نرمال باز آن در مسیر In1 به سافتاستارتر فرمان راهاندازی خواهد داد. با راهاندازی سافتاستارتر، خروجی دیجیتال اول آن با پایانههای 13 و 14 بستهشده و کنتاکتور Q21 پایدار میشود.
طبق دیاگرام فرمان، خروجیهای اول و دوم باید روی حالت On Time تنظیمشده باشند. در این حالت تا زمانی که شستی S3 با عنوان استپ فشرده نشود، سافتاستارتر با جهت راستگرد به کار خود ادامه میدهد.
رخ دادن هرگونه خطا در این مدار باعث باز شدن پلاتینهای 95 و 96 شده و تمام کنتاکتورها خاموش میشوند. قابلذکر است که هنگام رخ دادن خطا، هردو خروجی دیجیتال قرارگرفته در مسیر پایدار کنندهها، نیز باز خواهند شد.
مزیت دیگر این مدار وجود یک پلاتین N.C از کنتاکتور Q21 در مسیر بوبین Q22 و برعکس است. این کنتاکتها نقش اینترلاک الکتریکی را بازی کرده و از وصل همزمان کنتاکتورها جلوگیری میکنند.
برای تغییر جهت گردش ابتدا باید مدار را خاموشکنیم. این کار با فشردن شستی S3 انجام خواهد شد. در ادامه با فشردن شستی S2 کنتاکتور Q22 روشنشده و پلاتین نرمال باز آن در مسیر In1 به سافتاستارتر فرمان راهاندازی خواهد داد. برای پایدار کردن کنتاکتور چپگرد نیز از خروجی دیجیتال شمارهی 2 با فانکشن On Time استفادهشده است. پس با راهاندازی سافتاستارتر، کنتاکتور Q22 پایدار شده و الکتروموتور در جهت چپگرد راهاندازی میشود.
ازآنجاییکه فشردن شستی S3 یا استپ باعث قطع کنتاکتورها و در نتیجه قطع مدار قدرت سافتاستارتر میشود، در این مدار قابلیت سافت استپ و انواع ترمزها وجود ندارد.
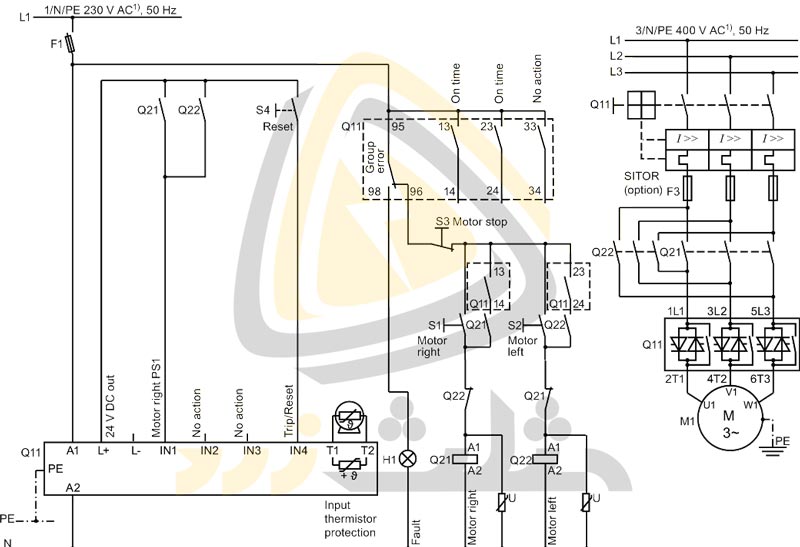
برای رفع مشکل سافت استپ در مدار قبلی، از یک رلهی فرمان با عنوان K1 استفاده میکنیم. رلهی K1 با هردو جهت گردش راستگرد و چپگرد روشنشده و توسط پلاتین نرمال باز خود در مسیر In1 به سافتاستارتر فرمان راهاندازی میدهد. این دیاگرام را میتوانید در صفحهی بعد مشاهده کنید.
تفاوت اصلی این مدار با نمونهی قبلی در فرمان خاموش یا استپ آن است. در این حالت فرمان استپ توسط شستی S4 تنها به رلهی فرمان K1 دادهشده و کنتاکتورهای قدرت تا پایان توقف وصل باقی میمانند. پس با این مدار میتوانیم از حالتهای توقف نرم یا انواع ترمز در هردو جهت گردش استفاده کنیم.
در تصویر زیر پلاتین خطا و خروجیهای 1 و 2 با فانکشنهای On Time نقش حفاظت را بر عهده دارند. در نظر داشته باشید که شستیهای استارت استفادهشده در مسیر کنتاکتورهای Q21 و Q22 دارای دو پلاتین نرمال باز هستند. پلاتین دوم این شستیها برای روشن کردن رلهی فرمان K1 استفاده میشود.
در این مدار با فشردن شستی S1 کنتاکتور Q21 و رلهیK1 بهصورت همزمان روشن میشوند. رلهی K1 دارای یک پلاتین پایدارکننده بوده پس از برداشتن دست از روی شستی استارت، به کار خود ادامه میدهد. یک پلاتین دیگر K1 در مسیر فرمان راهاندازی به سافتاستارتر بوده و این دستور را صادر میکند. با راهاندازی سافتاستارتر خروجیهای دیجیتال آن بستهشده و کنتاکتور Q21 پایدار میشود.
برای توقف نرم باید شستی S4 فشرده شود. این کار باعث خاموش شدن رلهی K1 شده و فرمان راهاندازی حذف خواهد شد. ازآنجاییکه خروجیهای دیجیتال سافتاستارتر تا پایان توقف باز نمیشوند، کنتاکتور Q21 نیز تا پایان توقف نرم وصل باقی میماند.
روند کار مدار در خصوص راهاندازی و توقف نرم بهصورت راستگرد، در مورد کار به شکل چپگرد نیز صادق هستند. در تصویر بالا اتصال سنسور حرارتی موتور به ترمینالهای T1 و T2 نیز نمایش دادهشده است.
مطالبی که در حال مطالعه ی آن هستید به صورت تصویری در دوره جامع راه اندازی و حفاظت موتور سه فاز آموزش داده شده است. در این دوره تصویری روش پلاک خوانی موتور، شناخت اصول حفاظت، شناخت تجهیزات راه اندازی و محاسبه سایز آن ها آموزش داده شده است. در بخش عملی می توانید سیم بندی راه اندازی های کنتاکتوری مانند تک ضرب، چپ گرد و راست گرد، ستاره مثلث به همراه نصب و سیم بندی 6 برند سافت استارتر زیمنس، اشنایدر، ABB، دانفوس، اوکام و سانترنو را مشاهده کنید. قسمت آخر دوره مربوط به بازدید از تاسیسات و تابلو برق های مختلف و بررسی چیدمان تجهیزات و سایز آن ها در تابلو برق است. جهت کسب اطلاعات بیشتر در خصوص این دوره می توانید صفحه آموزش جامع راه اندازی و حفاظت موتورهای سه فاز را مشاهده کنید.
6.کنترل با گشتاور پائین یا جاگ در سافت استارتر
در برخی از سافتاستارترهای دیجیتال یک قابلیت ویژه با عنوان جاگ یا Jog وجود دارد. این قابلیت به معنی کار با گشتاور و دور پائین بوده و میتواند بهصورت راستگرد و چپگرد انجام شود. قابلیت جاگ نیازی به کنتاکتور برای جابجایی فاز نداشته و توسط تایرستورها بهصورت داخلی انجام میشود.
تایرستورها برای هدایت ولتاژ در نیم سیکلهای مثبت و منفی طراحیشده و توانایی جابجایی فاز یا کنترل روی فرکانس را ندارند. حالت گشتاور پائین یا جاگ درواقع با کنترل روی هدایت تعداد نیم سیکلها انجام میشود. برای درک بهتر موضوع به تصویر زیر توجه کنید. این تصویر مربوط به شکل موج ولتاژ یکی از فازهای سافتاستارتر است. اگر تمام ولتاژ این شکل موج به الکتروموتور تحویل شود، کار عادی با گشتاور کامل را خواهیم داشت.

اگر تنها بخشی از ولتاژ هر نیم سیکل هدایت شود، سطح ولتاژ تحویلی به الکتروموتور کاهش پیدا میکند اما در فرکانس تغییری ایجاد نخواهد شد. این حالت دقیقاً در راهاندازی و توقف نرم توسط سافتاستارتر انجام میشود.
روش دیگر برای کنترل گشتاور و دور یک الکتروموتور، هدایت نکردن برخی از نیم سیکلها توسط تایرستورها است. برای درک بهتر این موضوع به تصویر زیر توجه کنید. در این شکل موج، قسمتهای تیره نیمسیکلهای هدایتشده و قسمتهای روشن نیمسیکلهای بلاک شده هستند.
این کار با برش ولتاژ بخشی از نیمسیکل مثبت و منفی متفاوت بوده و میتواند گشتاور و سرعت پائینتری ایجاد کند. درواقع در این حالت یک نیمسیکل بهصورت کامل هدایتشده و تعدادی دیگر نیز بهصورت کامل قطع خواهند شد.

برآیند هدایت نیمسیکلها میتواند بهصورت زیر نمایش داده شود. در این تصویر شکل موج معادل نیمسیکلهای هدایتشده را مشاهده میکنید. تقریباً این رفتار به معنی کاهش ولتاژ و کاهش فرکانس بهصورت معادل تلقی میشود. پس با توجه به مسائل شرح دادهشده، میتوان گفت که حالت جاگ باعث پائین آمدن سطح ولتاژ و گشتاور تولیدی و در نتیجه کاهش دور الکتروموتور خواهد شد.

در نظر داشته باشید که این روش کاهش گشتاور، باعث تولید حرارت زیادی در الکتروموتور میشود.(با کاهش سرعت، فن تعبیه شده روی شفت الکتروموتور نیز دیگر کارایی نخواهد داشت.) به همین علت تمام شرکتهای سازنده این هشدار را دادهاند که از حالت جاگ نباید در مدتزمان طولانی استفاده کنید. از طرفی به علت هدایت نیم سیکلها بهصورت کامل، روند سافتاستارت و سافتاستپ در حالت جاگ وجود ندارد.
حالت جاگ یک قابلیت ویژه بوده و مزایای آن در شرکتهای سازنده با عنوانهای مختلف مطرح میشود. بهعنوانمثال شرکت زیمنس از این قابلیت با عنوان فانکشن تمیزکنندهی پمپ یا Pump Cleaning استفاده میکند. با توجه به زمان هدایت نیم سیکلها، حالت جاگ میتواند در هردو جهت راستگرد و چپگرد انجام شود.
برای این کار نیاز به کنتاکتور نبوده و باید سافتاستارتر بهدرستی تنظیم شود. در برخی از سافتاستارترها مانند سری 44 زیمنس، قابلیت تنظیم میزان گشتاور برای جهتهای مختلف بهصورت جداگانه نیز وجود دارد.
برای استفاده از این قابلیت در هردو جهت باید دو ورودی دیجیتال را برای انتخاب جهت راستگرد و چپگرد و یک از ورودی دیگر را جهت فعال کردن فانکشن سرعت پائین تنظیم کنیم. در نظر داشته باشید که حالت گشتاور کامل تنها در یک جهت باقابلیت راهاندازی و توقف نرم انجام خواهد شد. جهت گردش نرمال با گشتاور کامل به توالی ورودی سافتاستارتر بستگی داشته و میتواند راستگرد یا چپگرد باشد.
در تصویر زیر دیاگرام مدار قدرت و فرمان کنترل الکتروموتور باقابلیت جاگ در هردو جهت را مشاهده میکنید. در بخش قدرت این مدار از کنتاکتور برای جابهجایی فاز استفادهنشده و کنترل سرعت و جهت توسط تایرستورها بهصورت داخلی انجام میشود.
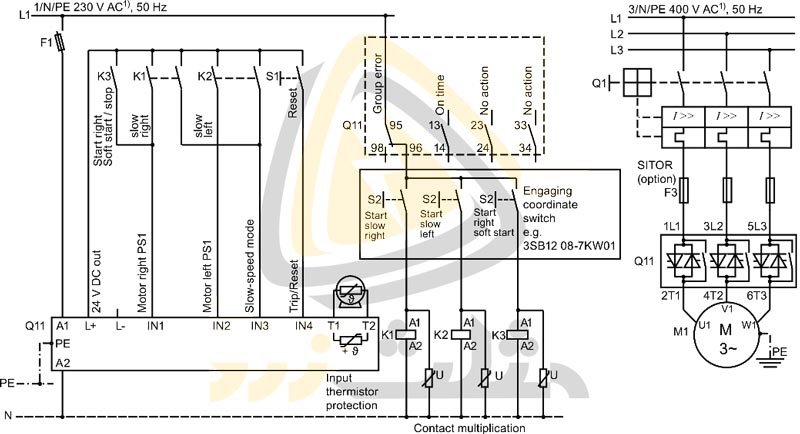
در بخش فرمان از یک جوی استیک با عنوان S2 برای کنترل جهتهای راست با سرعت پائین، چپ با سرعت پائین و راست با گشتاور کامل استفادهشده است. این جوی استیک در یک کادر بسته قرارگرفته و مدل پیشنهادی از شرکت زیمنس نیز در آن قیدشده است. ورودی این کنترلر از پلاتین Group Error بوده و در صورت رخ دادن خطا، کل سیستم متوقف خواهد شد.
در جهت راست با سرعت پائین، رلهی فرمان K1 فعالشده و دو پلاتین نرمال باز آن در مسیرهای In1 و In3 بسته میشوند. این پلاتینها ورودی فرمان راستگرد و سرعت پائین را بهصورت همزمان فعال کرده و سافتاستارتر با گشتاور پائین در جهت راست راهاندازی میشود. ازآنجاییکه این کنترل بهصورت لحظهای انجام میشود، هیچ پلاتین پایدارکنندهای در سیستم وجود ندارد.
با انتخاب جهت چپگرد با سرعت پائین در جوی استیک، رلهی فرمان K2 بستهشده و ورودیهای In2 و In3 بهصورت همزمان فعال میشوند. در این حالت الکتروموتور با گشتاور پائین در جهت چپگرد شروع به کار میکند.
با انتخاب جهت راستگرد با گشتاور کامل، رلهی فرمان K3 روشن میشود. این رله تنها یک پلاتین نرمال باز در مسیر In1 داشته و باعث راهاندازی الکتروموتور با گشتاور کامل بهصورت نرم میشود. تکرار میشود که در حالت جاگ راهاندازی و توقف نرم انجام نخواهد شد.
7.کنترل بهصورت فازی یا داخل مثلث سافت استارتر دیجیتال
یک الکتروموتور باقابلیت کار دائم بهصورت مثلث در شبکهی 400 ولت را میتوان به دو صورت خطی و فازی راهاندازی کرد. در روش فازی، سافتاستارتر بین کلافها قرارگرفته و حدود 58 درصد جریان را از خود عبور میدهد.
مزیت استفاده از این روش کوچکتر شدن سایز سافتاستارتر و کاهش هزینهی اولیه برای تهیهی آن است. در نظر داشته باشید با توجه به مدل و برند سافتاستارتر ممکن است برخی از قابلیتها مانند انواع ترمز در اتصال فازی امکانپذیر نباشد.
در اتصال 6 سیمه یا داخل مثلث، سافتاستارتر به ابتدای کلافها متصل شده و سمت دیگر کلافها بهصورت مستقیم برقدار خواهند شد. پس در این روش باید اتصالات ثابت داخل تخته کلم یا جعبه ترمینال بهصورت کامل باز شده و هر 6 رشته سیم از آن خارج شود.
ازآنجاییکه سافتاستارتر فوق بایپس داخلی دارد، در مدار قدرت تنها از یک کنتاکتور استفادهشده است. این کنتاکتور با عنوان Q21 بهصورت خطی قبل از سافتاستارتر نصبشده و بوبین آن توسط خروجی اول فرمان با فانکشن On Time کنترل میشود.
در این مثال کنتاکتور باید از نوع AC3 با جریان برابر یا بزرگتر از جریان کامل الکتروموتور باشد.
در بخش فرمان تصویر قبل، یک نقطهی همپتانسیل ایجادشده و PLC با منبع تغذیهی خارجی دستور راهاندازی و توقف سافتاستارتر را ورودی اول یا In1 اعمال میکند. همانگونه که مشاهده میکنید برای پایش وضعیت الکتروموتور از پلاتین خطا و سنسور دما نیز استفادهشده است. در این دیاگرام از ورودیهای دوم و سوم استفادهنشده و ورودی چهارم مربوط به ریست خارجی یا ریموت است.
نکتهی مهم در اتصال فازی، رعایت ترتیب صحیح ابتدا و انتهای کلافهای الکتروموتور است. در این روش باید هر گروه از کلافها مثلاً U1 و U2 بین دو فاز مخالف قرار بگیرند تا الکتروموتور بهصورت صحیح راهاندازی شود.
برای جابجایی فاز و تغییر جهت گردش الکتروموتور در مدارهای ستاره مثلث یا کنترل فازی، باید اتصال هردو سمت کلاف را بهصورت همزمان جابهجا کنیم تا قانون فوق رعایت شود.
به عبارت سادهتر درصورتیکه تنها فاز ورودی یا خروجی کلافها جابجا شود، الکتروموتور بهصورت نرمال کار نخواهد کرد.
ازآنجاییکه این مورد یکی از شایعترین مشکلات ( رعایت نکردن قانون فوق در مدار ستاره مثلث، باعث ایجاد مشکل در ضرب دوم یا هنگام سوئیچ به حالت مثلث خواهد شد.) در راهاندازی الکتروموتورها است، طبق تصویر زیر توصیهشده که جابجایی فاز قبل از اتصال کلافها و سافتاستارتر انجام شود.
بهترین نقطه برای جابجایی فاز در مدارهای ستاره مثلث و کنترل فازی سافتاستارتر، قبل یا بعد از بریکر اصلی است. با این کار جابهجایی هردو سمت کلاف انجامشده و نیازی به باز کردن اتصالات دیگر نیست.
8.کنترل 3 الکتروموتور موازی
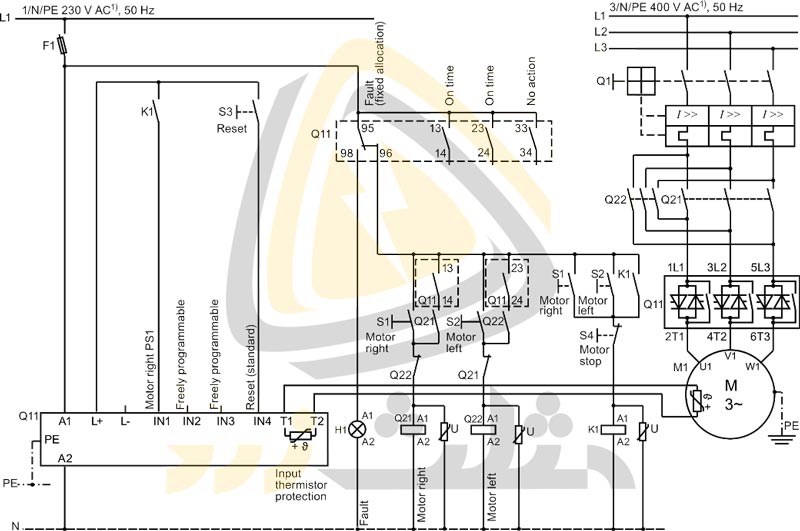
در بخشهای قبلی الزامات استفاده از سافتاستارتر برای راهاندازی چند الکتروموتور را بررسی کردیم. برای درک بهتر موضوع در این بخش مدار فرمان کنترل 3 الکتروموتور موازی با سافتاستارتر سری 44 آورده شده است. میتوانید مدار قدرت این مثال را در مقاله نصب و سیم بندی سافت استارتر با عنوان راهاندازی چند الکتروموتور مشاهده کنید.
نکتهی مهم در دیاگرام فوق، سری کردن پلاتین رلههای اضافهبار هر سه الکتروموتور است. در این روش اگر هر یک از الکتروموتورها دچار مشکل شوند، بوبین کنتاکتور Q21 قطعشده و تمام مدار بیبرق خواهد شد.
از طرفی برای اطلاع از وضعیت خطا در مدار نیز از چراغ سیگنال H1 با عنوان Fault استفادهشده است. در مسیر این چراغ سیگنال پلاتین نرمال باز رلههای اضافهبار و رلهی خطای سافتاستارتر بهصورت موازی نصبشدهاند.
9.کنترل 3 الکتروموتور ترتیبی با سافت استارتر
پارامترها در این سافتاستارتر به 3 گروه مستقل تقسیمشده و هر یک دارای تنظیمات جریان نامی، حفاظت، توقف و راهاندازی جداگانه هستند. به عبارت سادهتر میتوانید از این سافتاستارتر برای کنترل الکتروموتورهای چند سرعته، الکتروموتور با میزان بار متغیر یا 3 الکتروموتور مختلف استفاده کنید.
استفاده از تنظیمات جداگانه بیشتر در راهاندازی چند الکتروموتور استفاده میشود زیرا در این حالت خصوصیات موتورها کاملاً متفاوت هستند. برای آشنایی بیشتر با این نوع راهاندازی، در تصویر زیر دیاگرام بخش قدرت کنترل 3 الکتروموتور مستقل را مشاهده میکند.
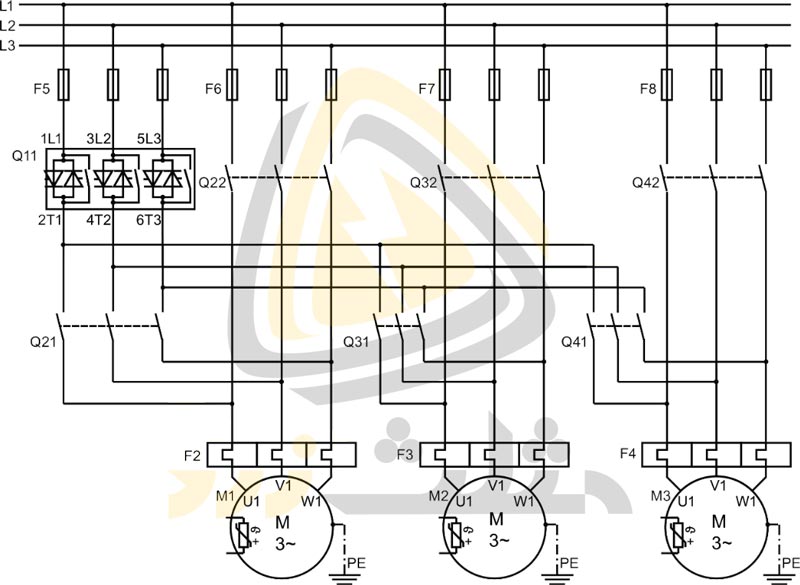
در این مدار قدرت برای هر الکتروموتور از دو کنتاکتور استفادهشده است. بهعنوانمثال کنتاکتور Q21 برای اتصال الکتروموتور اول به سافتاستارتر و کنتاکتور Q22 برای اتصال آن به شبکه است. این کنتاکتورها بر اساس توان الکتروموتور انتخابشده و نقش جداسازی و بایپس را دارند. با توجه به تصویر، حفاظت اتصالکوتاه و اضافهبار نیز برای هر الکتروموتور بهصورت مستقل در نظر گرفتهشده است. قابلذکر است که برای رسیدن به تیپ 2 کوردینه سازی، میتوان از فیوزهای نیمههادی در مسیر سافتاستارتر استفاده کرد.
در این بخش مدار فرمان کنترل الکتروموتورها را مشاهده میکنید. قابلذکر است که راهاندازی هر خط از الکتروموتورها بهصورت مستقل بوده و در هرلحظه میتواند انجام شود. در ضمن این مدار فاقد حالت توقف نرم و انواع ترمز است.
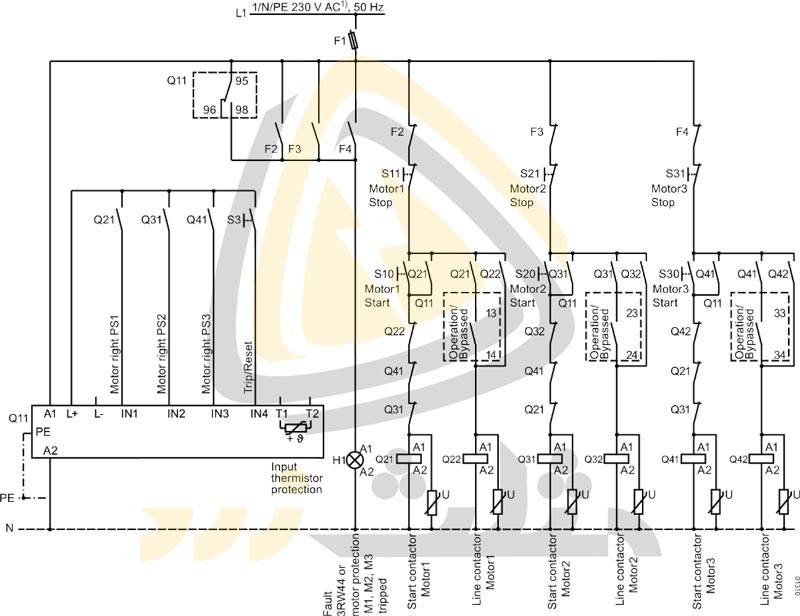
با توجه به وجود سیستم اضافهبار مجزا، از پلاتین خطای سافتاستارتر در این مدار استفادهنشده است. برای آشنا شدن با نحوهی کار این مدار، راهاندازی خط 1 را در نظر بگیرید. در این خط یک پلاتین نرمال بسته مربوط به رلهی اضافهبار F2، یک شستی استپ با عنوان S11 و یک شستی استارت با عنوان S10 وجود دارد.
در مسیر بوبین این کنتاکتور 3 پلاتین نرمال بستهی دیگر نیز وجود دارد. این پلاتینها برای ایجاد ایمنی در نظر گرفتهشده و از راهاندازی همزمان چند الکتروموتور جلوگیری میکنند. از طرفی اگر همین الکتروموتور قبلاً بهصورت موفق راهاندازی شده باشد، از ورود کنتاکتور Q21 به مدار جلوگیری خواهد شد.
با فشردن شستی S10 کنتاکتور Q21 روشنشده و الکتروموتور اول را به سافتاستارتر متصل میکند. با روشن و پایدار شدن کنتاکتور Q21، یک پلاتین نرمال باز آن در مسیر ورودی اول یا In1 بستهشده و سافتاستارتر با پروفایل الکتروموتور اول راهاندازی میشود.
یک پلاتین نرمال باز دیگر این کنتاکتور در مسیر خروجی دیجیتال اول با پایانههای 13 و 14 وجود دارد. این خروجی روی فانکشن بایپس تنظیمشده و پس از کامل شدن راهاندازی، کنتاکتور Q22 را برقدار میکند.
کنتاکتور Q22 از طریق پلاتین نرمال باز خود پایدار شده و الکتروموتور را به شبکه متصل میکند. این کار باعث باز شدن پلاتین نرمال بستهی آن در مسیر بوبین Q21 شده و الکتروموتور از سافتاستارتر جدا میشود.
خاموش شدن کنتاکتور Q21 باعث حذف فرمان راهاندازی در مسیر In1 شده و سافتاستارتر متوقف میشود. این کار باعث باز شدن رلهی خروجی اول با فانکشن بایپس نیز میشود اما با توجه به اتصال پایدارکنندهی Q22 به بعدازاین پلاتین، خللی در کار دائم الکتروموتور ایجاد نمیشود.
ازآنجاییکه فانکشن توقف نرم در این مدار وجود ندارد، با فشردن شستی استپ S11 یا عملکرد سیستم اضافهبار F2 یا قطع برق مدار فرمان، کنتاکتور Q22 رهاشده و الکتروموتور متوقف خواهد شد.
راهاندازی الکتروموتورهای دیگر نیز به همین شکل انجام میشود ولی نیاز به تنظیم فانکشنهای ورودی و خروجیهای دیجیتال دارد. طبق دیاگرام مدار فرمان، ورودیهای دو و سه با مشخصههای In2 و In3 روی پروفایل الکتروموتورهای دوم و سوم تنظیمشدهاند.
با این کار سافتاستارتر متوجه میشود که کدام تنظیمات را در خصوص جریان نامی، زمان راهاندازی و غیره استفاده کند. در نظر داشته باشید که حفاظت الکتروموتور در خلال راهاندازی توسط سافتاستارتر انجامشده و تنظیمات صحیح پروفایلها بسیار مهم است.
خروجیهای دیجیتال دوم و سوم نیز روی فانکشن بایپس تنظیمشده و رفتاری شبیه به خروجی اول دارند. به این نکته توجه کنید که تنظیم تمام خروجیها روی یک فانکشن مشخص هیچ منعی ندارد. بهعنوانمثال تنظیم تمام فانکشنها روی بایپس باعث میشود با پایان راهاندازی هر الکتروموتور، هر سه پلاتین بهصورت همزمان بسته شوند. باز و بسته شدن مکرر این پلاتینها اشکالی در کار مدار فرمان موردنظر ما ایجاد نخواهد کرد.
تنظیمات در خصوص چند ورودی دیجیتال روی یک فانکشن کمی متفاوت بوده و بهتر است انجام نشود. مثلاً اگر دو ورودی دیجیتال برای راهاندازی الکتروموتور اول تنظیم شوند، باید هردو ورودی بهصورت همزمان فعال باشند تا فرمان پذیرفته شود. به همین علت توصیه میگردد ورودیهای دیجیتال بدون استفاده را روی فانکشن No Action تنظیم کنید.
10.کنترل بهصورت لوکال و ریموت
یکی دیگر از فانکشنهای قابل تنظیم در ورودیهای دیجیتال حالت Manual Operation Local است. این فانکشن در خصوص سافتاستارترهایی استفاده میشود که مجهز به انواع کارت شبکه هستند.
بهعنوانمثال در تصویر زیر، سافتاستارتر به کارت Profibus متصل شده و میتواند از طریق شبکهی صنعتی کنترل شود. بهمنظور جلوگیری از هرگونه خطر یا کنترل سافتاستارتر بهصورت دستی میتوان از حالت لوکال یا محلی نیز استفاده کرد.
در این مثال ورودی دوم با عنوان Operation Mode روی حالت دستی تنظیمشده و در صورت فعال شدن، دیگر هیچ فرمانی از طریق شبکه موردپذیرش نخواهد بود. این کار با بستهشده سوئیچ S1 انجام میشود.
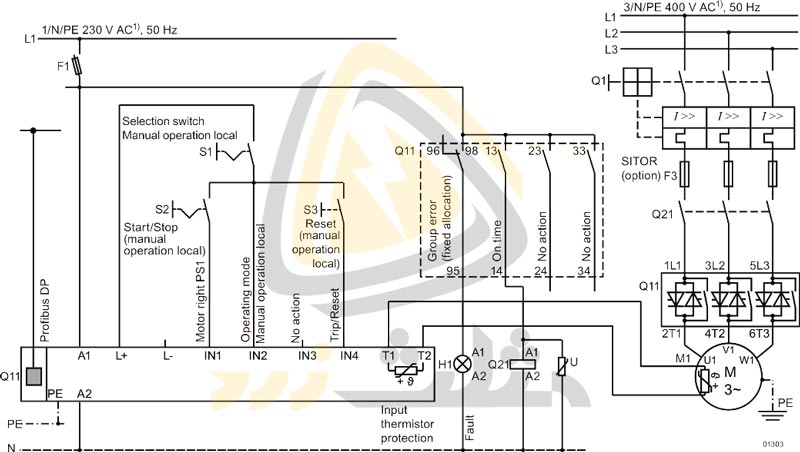
سوئیچ S1 علاوه بر فعال کردن In2 با عنوان کنترل محلی، تغذیهی سوئیچ S2 و شستی S3 را نیز تأمین میکند. بهعبارتدیگر با بسته شدن سوئیچ S1 و بعدازآن بسته شدن سوئیچ S2، سافتاستارتر بهصورت دائم کار خواهد کرد. شستی S3 نیز ورودی In4 را تحریک کرده و سافتاستارتر را ریست یا تریپ میکند.
توجه کنید که در کنار هر دو سوئیچ و شستی ریست عبارت Manual Operation Local به معنی عملکرد محلی قیدشده است. این عبارت یعنی ادوات فوق در حالت ریموت هیچ عملکردی نخواهند داشت.
سافت استارتر دیجیتال زیمنس سری 55
این سافتاستارتر تمام دیجیتال و پیشرفته قابلیتهای زیادی در اندازهگیری کمیتها، کنترل و حفاظت الکتروموتور دارد.
در این نسخه یک HMI رنگی برای تنظیم پارامترها، تنظیم ماژولهای ارتباطی، تغییر فانکشن رلهها، تنظیم آنالوگ خروجی، کنترل محلی، نمایش خطاها، نمایش 5 کمیت در حال اندازهگیری بهصورت همزمان، پشتیبان گیری توسط SD کارت، انتخاب زبان و غیره روی دستگاه وجود دارد. این پنل پیشرفته را میتوان از سافتاستارتر جدا کرده و روی درب تابلو برق نصب کرد. البته قابلیت استفاده از پنل موازی نیز در این ورژن وجود دارد.

از ویژگیهای منحصربهفرد این سافتاستارتر میتوان به مانیتورینگ تقارن فازها، فانکشن تمیز کردن پمپ، اسلات SD کارت جهت ذخیرهی اطلاعات، نرمافزار راهاندازی و تنظیم، وجود نسخههای ایمنی، گرمکن سیمپیچ و راهاندازی اضطراری نام برد. طبق تصویر زیر، بخش کنترل این سافتاستارتر شبیه سری 44 بوده اما کمی ارتقاء پیداکرده است.
تغذیهی سافتاستارتر توسط ترمینالهای A1 و A2 تأمینشده و از ترمینالهای L+ و M در مدار فرمان استفاده میشود. این سافتاستارتر مجهز به 4 ورودی دیجیتال قابلبرنامهریزی، 3 رلهی خروجی دیجیتال قابلبرنامهریزی، یک رلهی چنجآور خطا، ورودی سنسور دما و خروجی آنالوگ قابلبرنامهریزی بهصورت مستقل است.
ترمینالهای فرمان در سمت چپ سافتاستارتر وجود داشته و یک داکت برای نظم دادن به سیمها در همین محل تعبیهشده است. اگر داکت بهصورت زرد رنگ باشد، سافتاستارتر از نسخهی ایمنی بوده و قابلیتهای داخلی بیشتری دارد. این قابلیتها برای کارکردن در محیطهای پرخطر طراحیشده و نیازی به رلههای ایمنی جداگانه ندارد.
ازنظر مقدار قدرت نیز میتوان این سافتاستارتر سه فاز را بهصورت خطی و فازی راهاندازی کرد. برای آشنایی بیشتر با این سافتاستارتر، در ادامه تعدادی از مدارهای پرکاربرد آن را بررسی میکنیم.
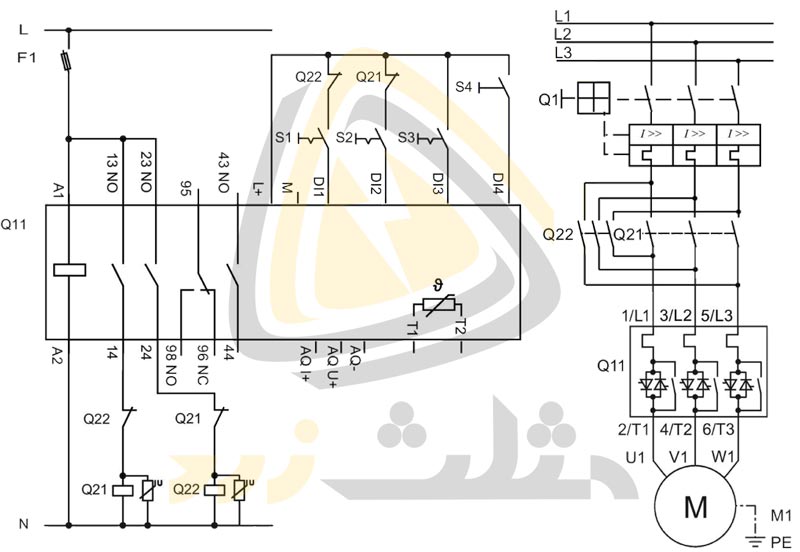
1.چپگرد و راستگرد گشتاور کامل و جاگ
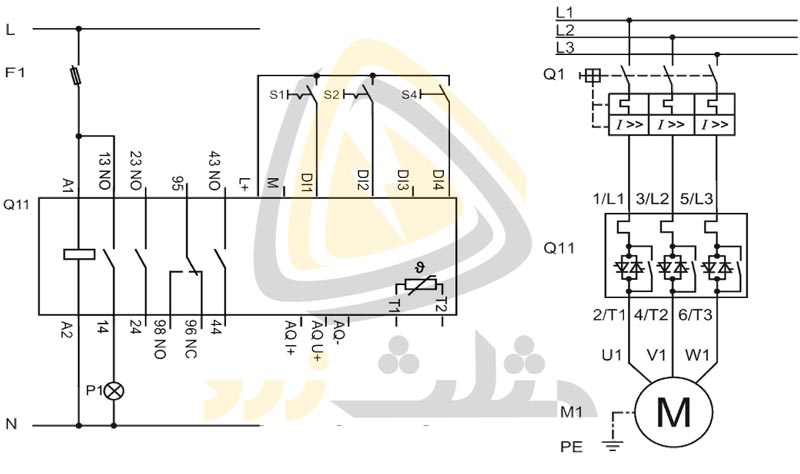
تغییر جهت گردش در سافتاستارترهای سری 55 نیز به دو صورت گشتاور کامل و گشتاور پائین یا Jog انجام میشود. طبق تصویر زیر، برای کار در گشتاور کامل باید از دو کنتاکتور در ورودی سافتاستارتر استفاده کنیم اما برای حالت جاگ نیازی به این کار نیست.
تفاوت اصلی مدار چپگرد و راستگرد گشتاور کامل در سری 44 و 55 مربوط به کنترل کنتاکتورها میشود. در این نمونه ورودیهای قابلبرنامهریزی با فانکشن چپگرد و راستگرد تنظیمشده و بوبین کنتاکتورها بهصورت مستقیم به خروجیهای دیجیتال سافتاستارتر متصل خواهند شد. به عبارت سادهتر در این سری نیازی به مدار خارجی چپگرد و راستگرد نبوده و کنترل بوبینها بهصورت مستقیم توسط سافتاستارتر انجام میشود. قابلذکر است که جهت افزایش سطح ایمنی، پلاتینهای نرمال بسته بهصورت معکوس در مسیر بوبینها و ورودیهای دیجیتال استفادهشدهاند.
در مدار فوق سوئیچ S1 برای روشن و خاموش راستگرد گشتاور کامل، سوئیچ S2 روشن و خاموش چپگرد گشتاور کامل و سوئیچ S3 بهعنوان گشتاور پائین در نظر گرفتهشده است. در این حالت از شستی S4 بهعنوان ریست استفادهشده و میتوان خروجی آنالوگ و سنسور دما را نیز بهصورت مستقل سیمبندی کرد.
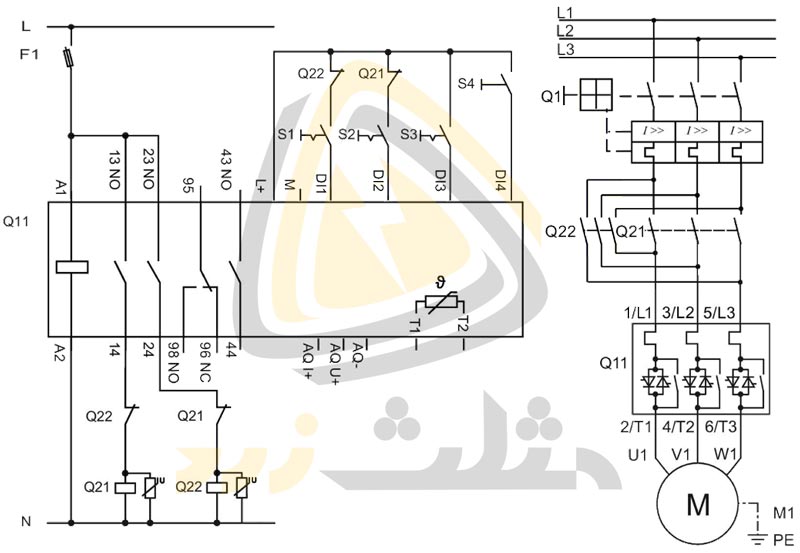
2.کنترل با گشتاور کامل
مدار قدرت چپگرد و راستگرد گشتاور کامل و بدون حالت جاگ شبیه به نمونهی قبلی است. در این روش نیز از دو کنتاکتور استفادهشده ولی در ورودیهای دیجیتال فانکشن جاگ تعریف نخواهد شد.
در مدار بالا سوئیچ S1 برای حالت راستگرد و سوئیچ S2 برای حالت چپگرد باقابلیتهای سافت استارت و سافت استپ در نظر گرفتهشده است. با تنظیم ورودیهای دیجیتال بهصورت چپگرد و راستگرد، نیازی به مدار خارجی نبوده و میتوان از خروجیهای دیجیتال بهصورت مستقیم برای کنترل بوبین کنتاکتورها استفاده کرد.
در دیاگرام مدار فرمان نحوهی استفاده از پلاتینهای نرمال بسته جهت افزایش سطح ایمنی نمایش دادهشده است. این پلاتینها بهصورت معکوس در مسیر بوبین کنتاکتورها و ورودیهای دیجیتال قرارگرفتهاند تا بههیچوجه وصل همزمان اتفاق رخ ندهد.
3.فانکشن تمیز کردن پمپ
درصورتیکه به حالت چپگرد و راستگرد گشتاور کامل نیازی نباشد، میتوان از دیاگرام زیر استفاده کرد. طبق تصویر در بخش قدرت از هیچ کنتاکتوری برای جابجایی فاز استفادهنشده و ورودیهای دیجیتال با فانکشن تمیز کردن پمپ تنظیمشدهاند. ازآنجاییکه الکتروپمپها بهصورت معکوس کار نمیکنند، از سوئیچ S1 تنها برای حالت گشتاور کامل باقابلیت سافتاستارت و سافتاستپ استفادهشده است.
با بسته شدن سوئیچ S2، جهت گردش الکتروموتور عوضشده و پمپ با گشتاور پائین شروع به کار میکند. این قابلیت بهصورت لحظهای بوده و برای تمیز کردن پرهها استفاده میشود. طبق موارد قبلی، از شستی S4 نیز در این مدار برای ریست سافتاستارتر استفاده میشود.
تمیز کردن پمپ را میتوان بهصورت دستی انجام داده یا در حالت خودکار تنظیم کرد. با قرار دادن فانکشن تمیز کردن پمپ در حالت خودکار، این وظیفه با دقت بالایی توسط سافتاستارتر انجام میشود.
تشخیص میزان آلودگی در پرهها به کمک بخش اندازهگیری سافتاستارتر انجامشده و در صورت نیاز پمپ متوقف میشود. در این شرایط فانکشن تمیز کردن پمپ فعالشده و چند لحظه الکتروپمپ را بهصورت معکوس راهاندازی میکند.
درصورتیکه آلودگی روی پرههای پمپ افزایش پیدا کند، رابطهی توان اکتیو و راکتیو مصرفی الکتروپمپ تغییر کرده و سافتاستارتر این هشدار را دریافت میکند. در صورت خودکار بودن قابلیت تمیز کردن پمپ، این کار بهصورت خودکار و بدون نیاز به مدار خارجی انجام خواهد شد.
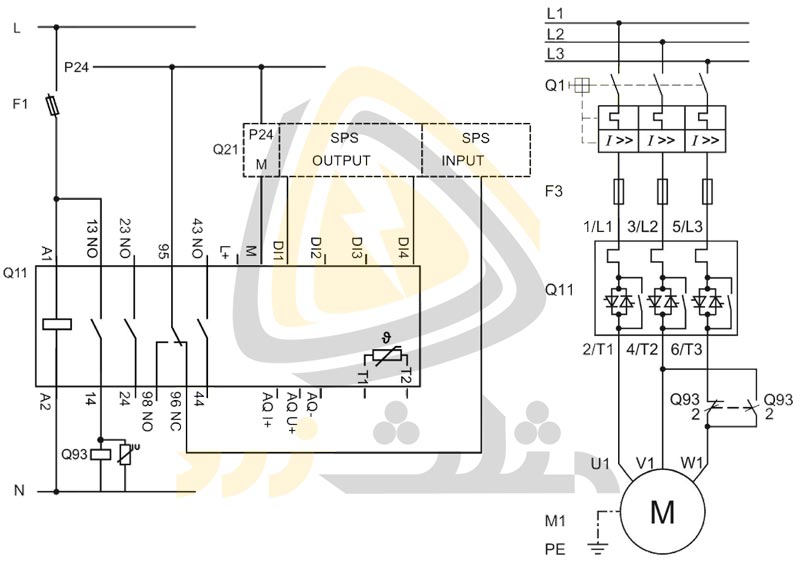
4.ترمز جریان مستقیم یا DC
در تصویر زیر نحوهی استفاده از سافتاستارتر به همراه کنتاکتور ترمز را مشاهده میکنید. همانند سری 44، کنترل این کنتاکتور توسط سافتاستارتر انجام خواهد شد.

 مثلث زرد
مثلث زرد مثلث زرد
مثلث زرد
 مثلث زرد
مثلث زرد  مثلث زرد
مثلث زرد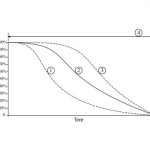 مثلث زرد
مثلث زرد مثلث زرد
مثلث زرد
بسیار عالی
مهندس بهترینها رو واستون آرزو میکنم در پناه خداوند در اوج پر قدرت باشید
سلام وقت بخیر. ممنون از نظر لطف شما و امیدواریم که مطالب مفید واقع شده باشه.