انواع الکتروموتور و کاربرد آنها
انواع الکتروموتور
الکتروموتور یکی از پرکاربردترین ماشینهای الکتریکی بوده و در مدلهای بسیار متنوعی ساخته میشود. وظیفه انواع الکتروموتور برقراری ارتباط میان سیستم الکتریکی و مکانیکی است. در واقع انرژی الکتریکی در موتور به انرژی مکانیکی تبدیل میشود.
رابطه بین الکتریسیته و مکانیک در الکتروموتورها بر اساس میدان الکترومغناطیسی صورت میگیرد. الکتروموتورها میتوانند تامین کنندهی نیروی مکانیکی به صورت خطی و دورانی باشند. با توجه به نرخ استفادهی موتورهای دورانی، الکتروموتورها با عنوان ماشینهای دوار نیز شناخته میشوند.
بر اساس تحقیقات شرکت ABB تقریبا 30 درصد انرژی جهان توسط الکتروموتورها مصرف میگردد.
اجزای موتور
تبدیل انرژی الکتریکی به مکانیکی در الکتروموتور به واسطهی دو بخش مجزا و مهم صورت میگیرد. بخش اول مربوط به تولید میدان مغناطیسی است. میدان مغناطیسی اغلب توسط سیم پیچهای نصب شده در بدنهی الکتروموتور ایجاد میشود. در برخی از موتورها از مغناطیس دائم نیز استفاده میشود. محل قرارگیری و نقش مغناطیس دائم در موتورها ممکن است متفاوت باشد.
بدنهی ثابت الکتروموتور از اجزای متنوعی تشکیل شده و استاتور نام دارد. از اجزای استاتور میتوان به پوسته خارجی، هسته فلزی، سیم پیچ، اتصالات الکتریکی، اتصالات مکانیکی و غیره اشاره کرد.
داخل استاتور یک بخش دوار به نام رتور قرار میگیرد. رتور میدان مغناطیسی را به حرکت مکانیکی تبدیل کرده و در نهایت آن را به بار منتقل میکند. رتور با توجه به نوع موتور میتواند از اجزای متنوعی مانند شفت، هستهی فلزی، سیم پیچ، ذغال، رینگ، کموتاتور و غیره تشکیل شده است. در الکتروموتور بخشهای دیگری مانند جعبه اتصالات، بلبرینگ، سیستم تهویه، سنسورهای حرارتی و غیره نیز وجود دارد. در تصویر اجزای یک موتور سه فاز القایی را مشاهده میکنید. موتورهای القایی سه فاز ساختمان بسیار ساده ای دارند.
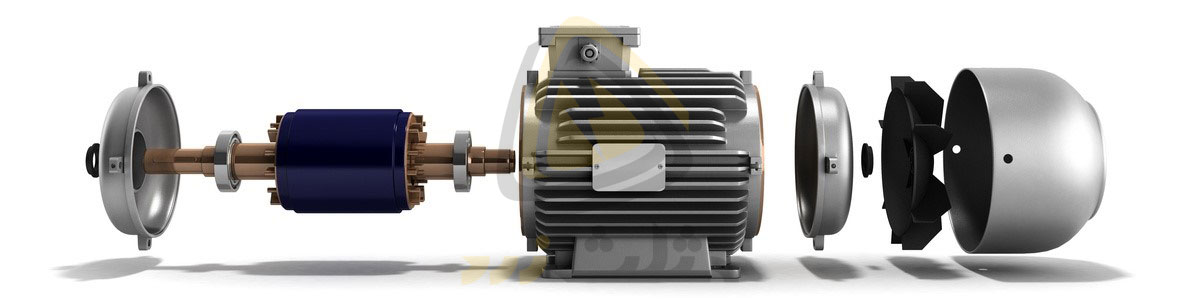
تصویر 1 اجزای الکتروموتور
سنسورهای حرارتی به منظور مانیتور کردن وضعیت دمای سیم پیچها، بلبرینگها و غیره در الکتروموتور تعبیه میشوند. سیمهای مربوط به سنسورهای حرارتی در جعبهی ترمینال موتور قرار گرفته و به رله یا سیستم مانیتورینگ متصل خواهند شد. اندازه گیری دمای سیم پیچ و اجزای الکتروموتور نقش بسیار مهمی در حفاظت از آن دارد.
استاتور
استاتور بخش ثابت الکتروموتور است. استاتور وظایف زیادی از جمله حفاظت از اجزای داخلی، ایجاد شرایط برقراری تهویه، ایجاد شرایط نصب الکتریکی، ایجاد شرایط نصب مکانیکی، تولید میدان مغناطیسی، نگهداری مگنت ها، نگهداری رتور و غیره را بر عهده دارد.
استاتور در اغلب موتورها تولید کنندهی میدان مغناطیسی است. میدان مغناطیسی توسط سیم پیچهای داخل استاتور یا مغناطیسهای دائم تولید میشود. نحوه قرارگیری سیم پیچها، مگنتها، تعداد فازها، سطح مقطع، تعداد دور و غیره تعیین کنندهی انواع الکتروموتور هستند. به عنوان مثال در استاتور الکتروموتورهای سه فاز از سه دسته سیم پیچ مجزا استفاده شده است.
رتور
رتور داخل میدان دوار استاتور قرار گرفته و ممکن است سرعتی برابر یا متفاوت با آن را داشته باشد. موتورهای الکتریکی از نظر رابطهی بین سرعت میدان دوار و سرعت روتور به دو نوع سنکرون و آسنکرون تقسیم میشوند. تفاوت موتورهای سنکرون با آسنکرون در اختلاف سرعت رتور با استاتور است. در موتورهای سنکرون، سرعت میدان دوار با سرعت رتور برابر است.
رتور ماشینهای DC ساختار ویژهای نام داشته و با عنوان آرمیچر شناخته میشود. آرمیچر دارای سیم پیچ، کموتاتور، شفت و غیره است.
الکتروموتورها از نظر نوع ولتاژ، تعداد فاز، تعداد قطب، سرعت، تکنولوژی و غیره به گروههای متنوعی تقسیم میشوند. اولین گروهبندی الکتروموتورها مربوط به نوع ولتاژ آنها است. به صورت کلی میتوان الکتروموتورها را به دو گروه DC و AC تقسیم کرد. هر یک از این الکتروموتورها دارای زیر گروههای بسیار متنوعی هستند. در ادامه انواع مختلف الکتروموتورهای AC و DC معرفی شده اند.
انواع الکتروموتور DC
موتورهای جریان مستقیم یا DC از نظر قیمت در گروه گرانترینها قرار میگیرند. این موتورها به یک منبع DC یا یک مبدل AC به DC نیاز دارند. موتورهای DC قادر هستند با سرعتهای مختلفی کار کنند. روش کنترل سرعت موتورهای DC ساده بوده و در رنج بسیار متنوعی قابل انجام است. موتورهای DC در تاسیساتی استفاده میشوند که میزان سرعت، کنترل دور، دقت، گشتاور و غیره بسیار مهم باشد.
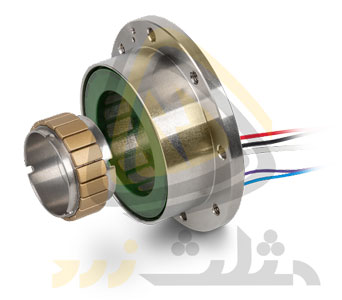
در یک موتور DC دو دسته سیم پیچ با عنوان سیم پیچ میدان و سیم پیچ آرمیچر وجود دارد. تاثیر این دو سیم پیچ بر روی یکدیگر باعث چرخش شفت موتور خواهد شد. سیم پیچ میدان در استاتور یا بخش ثابت موتور قرار دارد. سیم پیچ آرمیچر نیز روی بخش دوار یا روتور قرار میگیرد.

تصویر 2 آرمیچر موتور DC به همراه کموتاتور
جهت انتقال انرژی به سیم پیچ رتور از جاروبک، کموتاتور و غیره استفاده میشود. با توجه به اجزای داخلی متعدد، موتورهای جریان مستقیم هزینهی اولیه و هزینهی نگهداری بالایی دارند. البته امروزه موتورهای DC بدون جاروبک نیز وجود دارند. این موتورها در مقایسه با نسخههای قدیمی دارای استهلاک کمتری هستد. موتورهای بدون جاروبک اصطلاحا براش لس نامیده میشوند.
تصویر 3 تکنولوژی موتورهای بدون جاروبک
موتورهای جریان مستقیم با توجه به آرایش سیم پیچها و روش اتصال آنها نام گذاری میشوند. به عنوان مثال:
- موتور با تحریک سری
- موتور با تحریک مستقل
- موتور با تحریک ترکیبی، سری موازی یا کومپوند
- موتور مغناطیس دائم
- موتور با تحریک موازی
در تصویر دیاگرام سه نوع موتور DC را مشاهده میکنید. هریک از موتورهای DC دارای مزایا و معایب خاص خود هستند. برای انتخاب موتور DC حتما باید به گشتاور، دور، کنترل سرعت، ولتاژ، جریان و غیره توجه کنید.
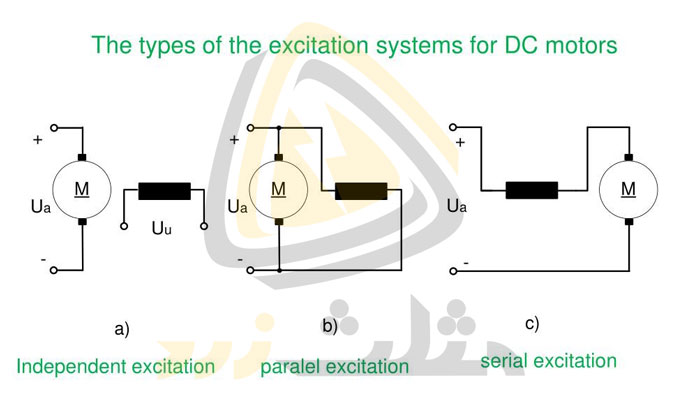
تصویر 4 دیاگرام موتورهای سری a تحریک مستقل، b تحریک موازی و c تحریک سری
انواع الکتروموتور AC
الکتروموتورهای جریان متناوب یا AC در صنعت بسیار پر مصرف هستند زیرا منبع الکتریکی در دسترس به صورت AC است. الکتروموتورهای جریان متناوب اغلب با عنوان موتورهای القایی نیز شناخته میشوند. الکتروموتورهای AC از نظر تکنولوژی به گروههای سنکرون و القایی تقسیم میشوند. این دو تکنولوژی از نظر سیم پیچی، روش کنترل، مزایا و غیره با یکدیگر متفاوت هستند.
موتورهای سنکرون
موتورهای سنکرون به شکل AC بوده که با سرعت ثابت و برابر با سرعت میدان دوار کار میکنند. موتورهای سنکرون بدون لغزش بوده و اغلب برای بارهای بسیار بزرگ استفاده میشوند. ساخت موتور سنکرون در ابعاد کوچک بسیار پر هزینه خواهد بود. این موتورها در مقایسه با مدلهای دیگر جریان متناوب دارای هزینهی اولیه بالاتری هستند.
در موتورهای سنکرون از دو دسته سیم پیچ یا یک سیم پیچ و یک مغناطیس دائم استفاده میشود. تاثیر دو سیم پیچ یا سیم پیچ و مغناطیس دائم باعث گردش شفت موتور خواهد شد. موتورهای سنکرون از نظر تعداد فاز به مدلهای تکفاز و سه فاز تقسیم میشوند. برخی از مدلهای موتور سنکرون عبارتنداز:
- رلوکتانسی
- مغناطیس دائم
- قطب برجسته
- قطب غیر برجسته
موتورهای القایی
موتورهای القایی با عنوان آسنکرون نیز شناخته میشوند. این موتورها معمولا با سرعت ثابت و کمی پائینتر از سرعت میدان دوار کار میکنند. تفاوت بین سرعت دوار و سرعت موتور با پدیدهای بنام لغزش تعریف میشود. جهت آشنایی بیشتر مقاله لغزش موتور القایی و محاسبه گشتاور را مطالعه کنید. با بارگذاری روی شفت موتورهای القایی، میزان سرعت آنها تغییر کمی خواهد داشت.
موتورهای جریان متناوب و القایی از نظر عملی تقریبا برای انواع ماشینها مناسب هستند. مشکل اصلی در موتورهای القایی روش کنترل سرعت آنها بود. با معرفی تکنولوژی اینورترها، مشکل کنترل سرعت نیز مرتفع گردید. امروز با انواع درایوهای فرکانس متغیر میتوان کنترل مناسبی روی دور و سرعت موتورهای القایی داشت. از مزایای الکتروموتورهای القایی جریان متناوب میتوان به این موارد اشاره کرد:
- ساختمان ساده
- پروسه ساخت ساده
- هزینه اولیه کم
- کنترل و راه اندازی ساده
- انعطاف و انطباق بالا با انواع بار
- راندمان بالا
- سرویس و نگهداری کم
موتورهای القایی از نظر تعداد فاز به دو گروه کلی تکفاز و سه فاز تقسیم میشوند. هر یک از این گروهها دارای مدلهای رتور قفس سنجابی و رتور سیم پیچی شده هستند. مدلهای اصلی موتورهای تکفاز عبارتنداز:
- موتور تک خازنی یا خازن دائم کار
- موتور با استارت خازنی
- موتور دو خازنی
- موتور فاز شکسته
- موتور قطب چاکدار و …
موتورهای خطی
موتورهای معمولی انرژی الکتریکی را به نیروی چرخشی یا دورانی تبدیل میکنند. گاهی اوقات بجای حرکت دورانی به حرکتهای خطی نیاز است. در صورت نیاز به حرکتهای رفت و برگشت میتوان از موتورهای خطی استفاده کرد. موتور خطی شبیه به یک موتور دوار است که استاتور آن باز شده باشد. در تصویر استاتور ماشین دوار و تبدیل آن به یک موتور خطی را مشاهده میکنید. موتورهای خطی از نظر نوع ولتاژ، تکنولوژی و ساختار در گروههای متنوعی ساخته میشوند.
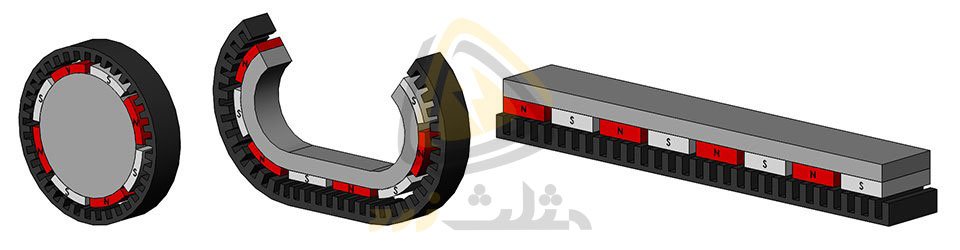
تصویر 5 استاتور ماشین خطی
موتورهای یونیورسال
بین دو گروه موتورهای DC و موتورهای AC یک گروه دیگر نیز تعریف میشود. این گروه از موتورها با عنوان یونیورسال شناخته میشوند. موتورهای یونیورسال قابلیت کار با هردو ولتاژ را داشته و در ماشین آلات خاصی استفاده میشوند. طبق تصویر، موتورهای یونیورسال دارای دو دسته سیم پیچ، ذغال، کوموتاتور و غیره هستند.
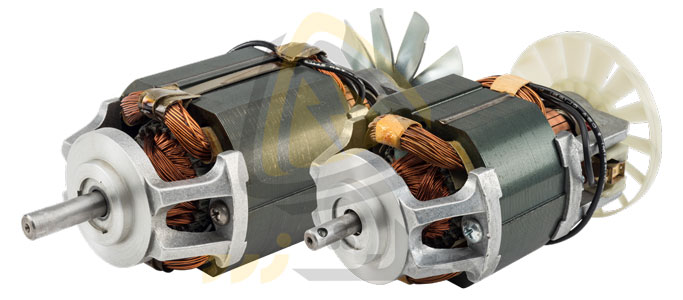
تصویر 6 موتور یونیورسال
چارت انواع الکتروموتور
در این بخش چارت انواع الکتروموتور آورده شده است. از گروهبندیهای اصلی میتوان به موتورهای AC، موتورهای یونیورسال و موتورهای DC اشاره کرد. موتورهای AC به گروههای تکفاز، خطی و سه فاز تقسیم میشوند. همانطور که مشاهده میکنید هر یک از این گروهها دارای مدلهای مختلفی هستند. موتورهای DC نیز به گروههای تحریک سری، تحریک مستقل، تحریک کومپوند، مغناطیس دائم و موازی تقسیم میشوند. چارت کلی موتورها در تصویر زیر آورده شده است:
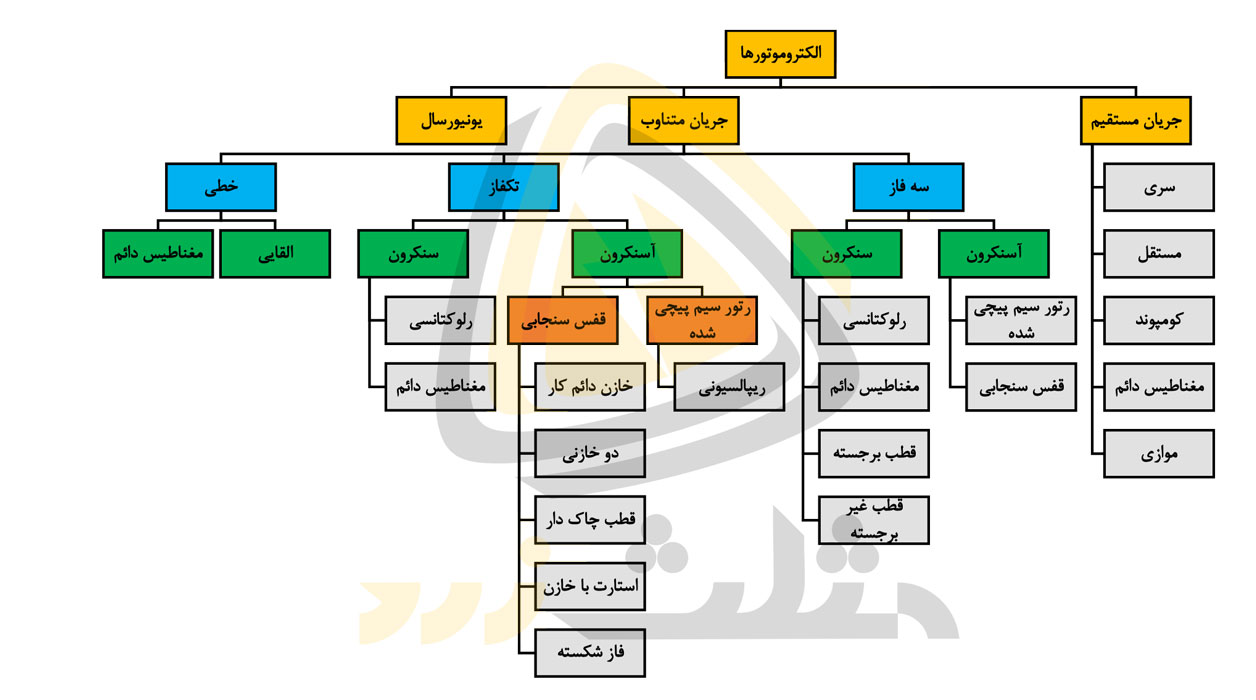
چارت انواع الکتروموتور
موتورهای خاص
موتورهای بررسی شده تا کنون برای کاربردهای عادی ساخته میشوند. در اغلب موارد این موتورها راه اندازی شده و ساعتهای متوالی بدون تغییر در سرعت به کار خود ادامه میدهند. برای کنترل سرعت، جهت گردش و گشتاور موتورهای DC و AC از انواع کانورتر و اینورتر استفاده میشود.
به منظور کنترل دقیق و ساخت سیستمهای پیچیده، موتورهای دیگری نیز تولید شده اند. برخی از این موتورها دارای تکنولوژی و کاربری منحصر به فردی هستند. موتورهایی مانند استپ موتور، سرو موتور، اسپیندل موتور و غیره در ماشین آلات خاص مانند رباتها و CNC ها دیده میشوند. موتورهای خاص به صورت خطی و دورانی ساخته شده و معمولا سیستم کنترلی خود را دارند.
 مثلث زرد
مثلث زرد مثلث زرد
مثلث زرد مثلث زرد
مثلث زرد مثلث زرد
مثلث زرد مثلث زرد
مثلث زرد مثلث زرد
مثلث زرد مثلث زرد
مثلث زرد
دیدگاه خود را ثبت کنید
تمایل دارید در گفتگوها شرکت کنید؟در گفتگو ها شرکت کنید.